Télécharger en tant que PDF, PPTX








![N. Brauner 217
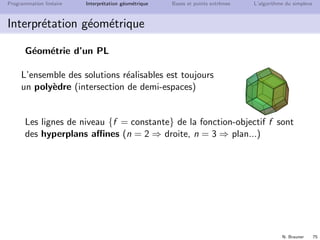
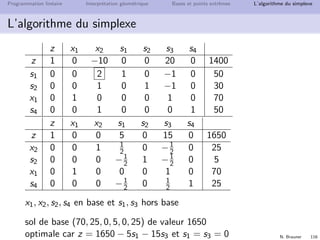
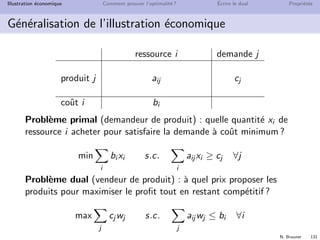
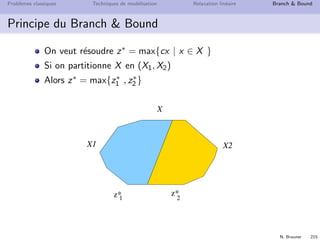
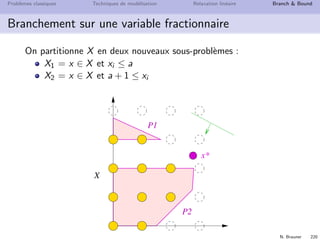
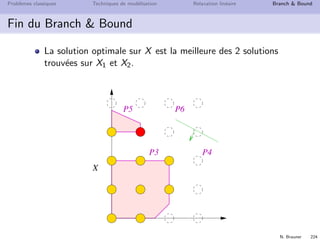
Probl`emes classiques Techniques de mod´elisation Relaxation lin´eaire Branch Bound
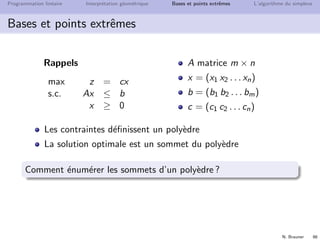
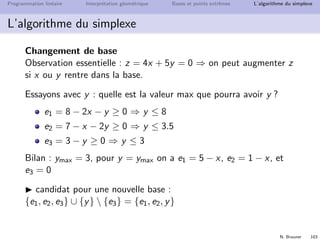
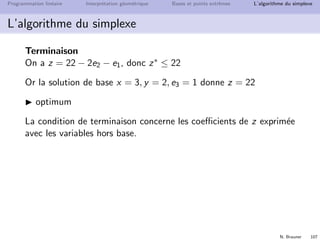
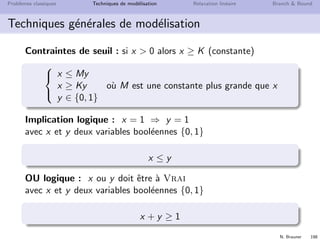
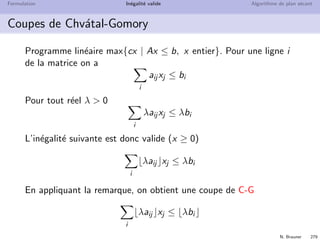
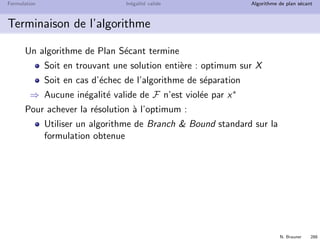
Borne sup´erieure
Comment d´eterminer qu’il est inutile d’explorer X2 sans
calculer z∗
2 ?
⇒ Estimation [par exc`es] de la valeur de z∗
2
D´efinition
Une fonction des instances dans R est une borne sup´erieure ssi elle
est sup´erieure `a la valeur optimum pour chaque instance.
Pour un PLNE, une borne sup´erieure est donn´ee par
sa relaxation lin´eaire](https://image.slidesharecdn.com/ro-160425234515/85/RECHERCHE-OPERATIONNELLE-SEMESTRE-6-200-320.jpg)

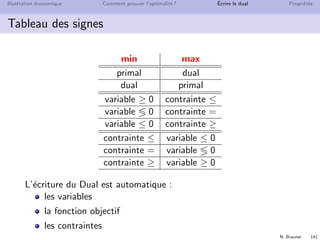
![N. Brauner 236
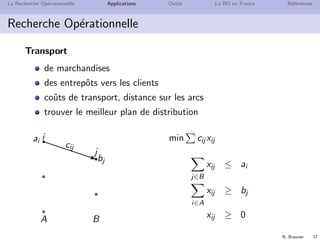
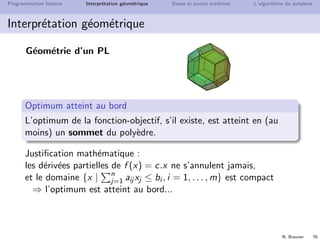
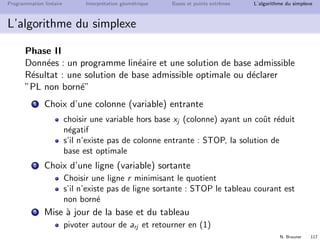
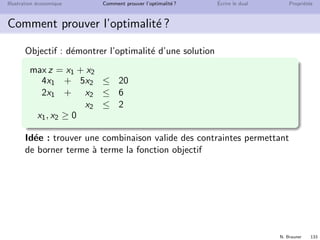
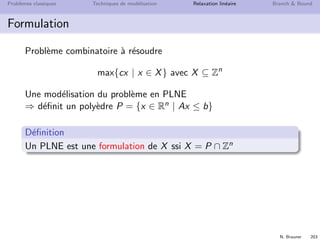
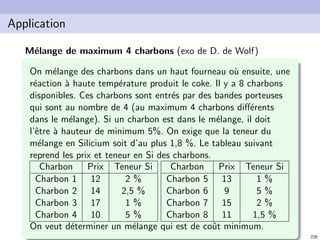
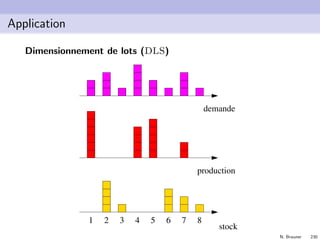
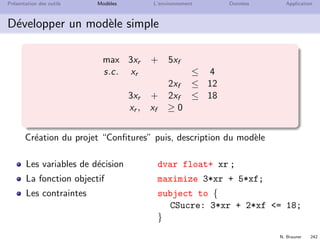
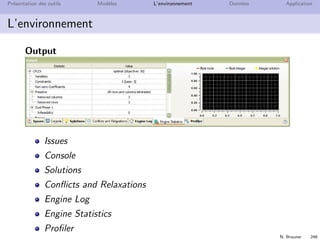
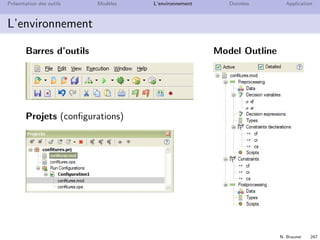
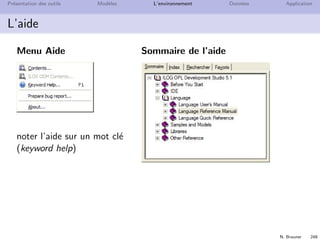
Pr´esentation des outils Mod`eles L’environnement Donn´ees Application
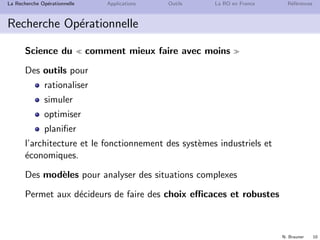
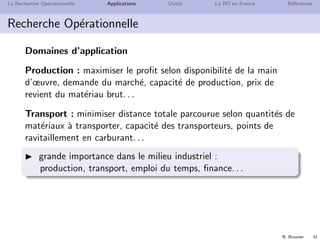
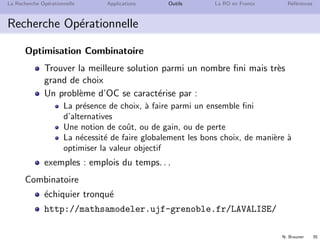
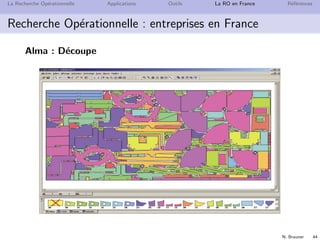
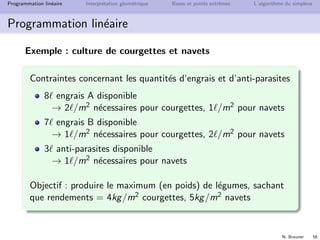
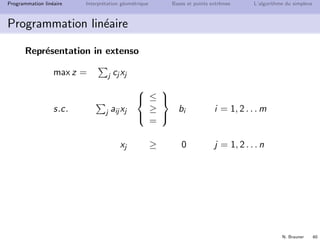
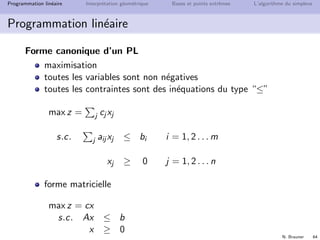
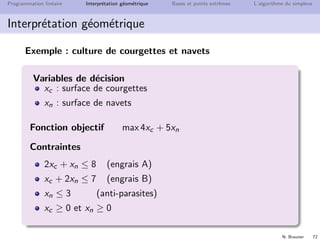
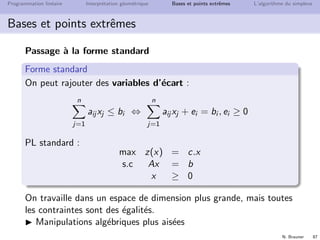
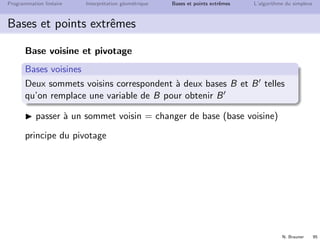
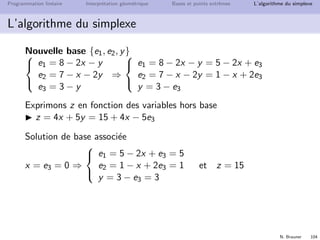
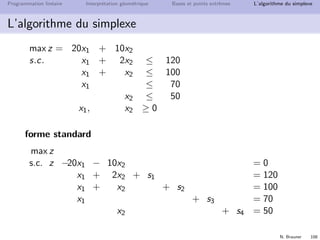
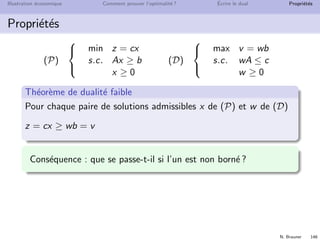
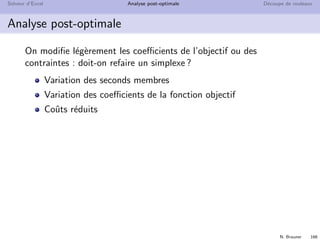
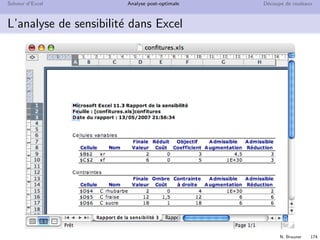
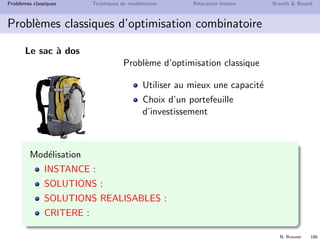
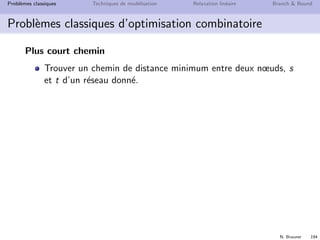
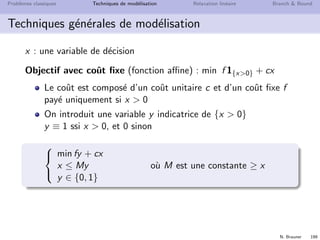
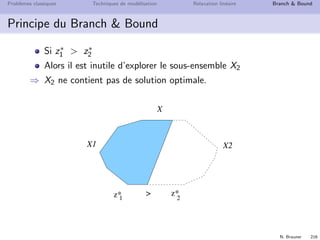
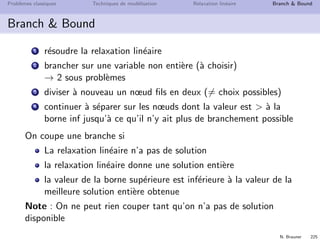
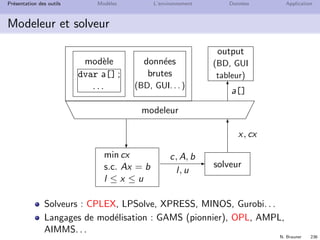
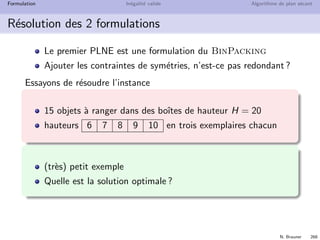
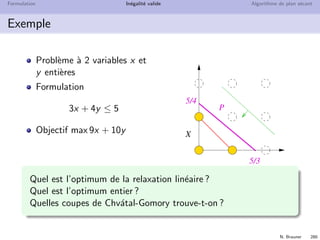
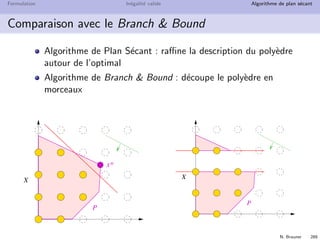
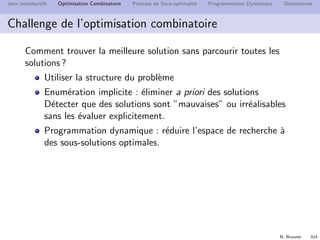
Modeleur et solveur
min cx
s.c. Ax = b
l ≤ x ≤ u
solveur
mod`ele
dvar a[] ;
. . .
donn´ees
brutes
(BD, GUI. . . )
output
(BD, GUI
tableur)
e
ee
¡
¡¡
modeleur
c
T
T
E
l, u
c, A, b
x, cx
a[]
Solveurs : CPLEX, LPSolve, XPRESS, MINOS, Gurobi. . .
Langages de mod´elisation : GAMS (pionnier), OPL, AMPL,
AIMMS. . .](https://image.slidesharecdn.com/ro-160425234515/85/RECHERCHE-OPERATIONNELLE-SEMESTRE-6-219-320.jpg)
![N. Brauner 250
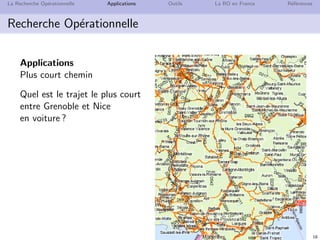
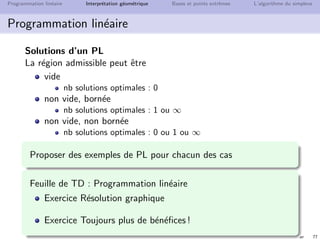
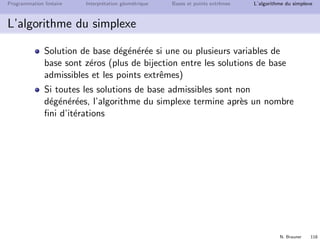
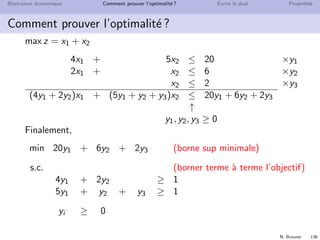
Pr´esentation des outils Mod`eles L’environnement Donn´ees Application
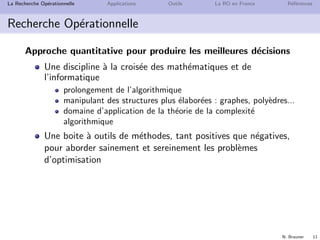
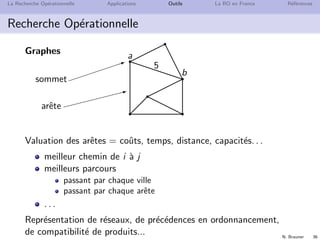
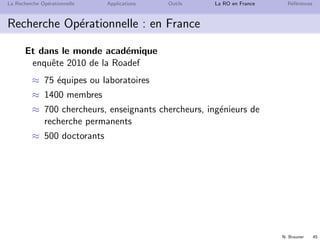
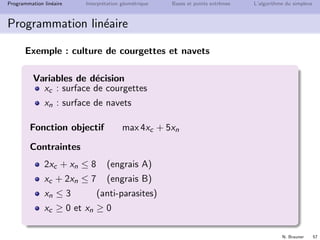
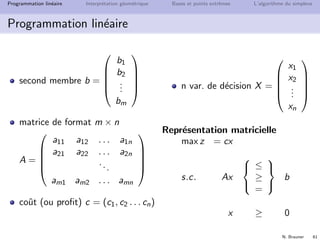
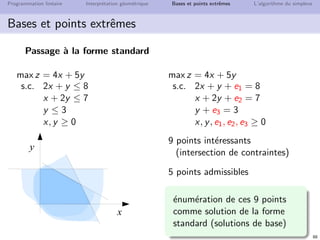
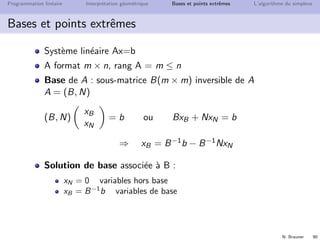
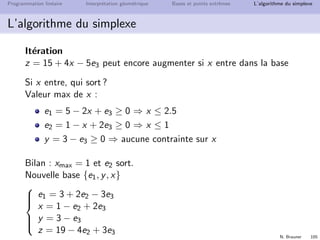
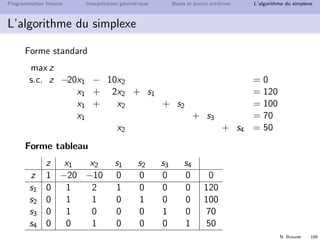
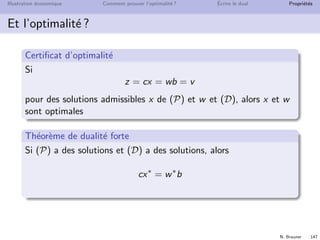
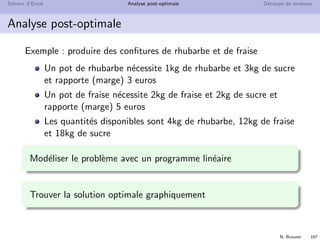
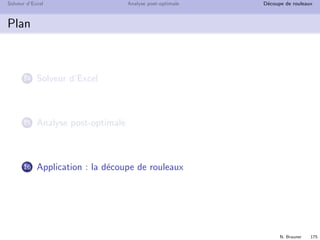
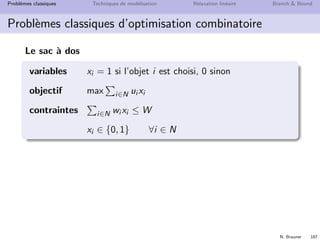
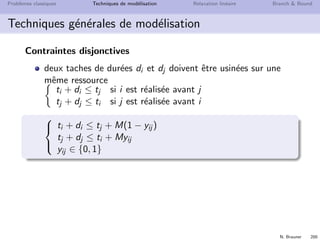
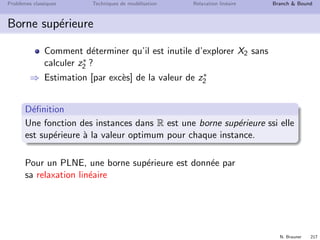
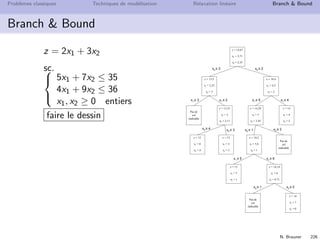
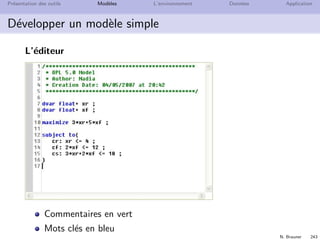
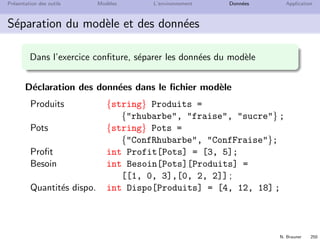
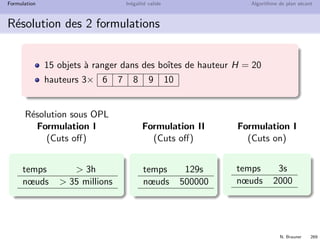
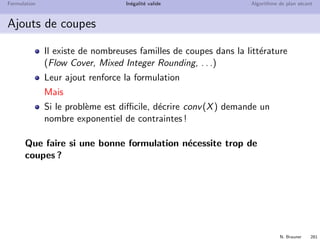
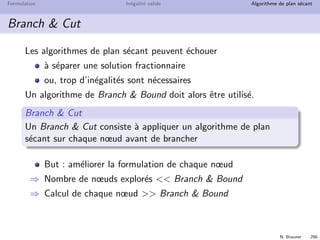
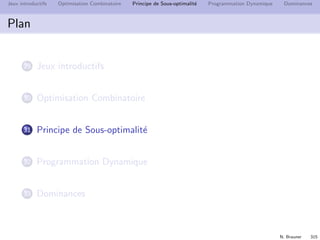
S´eparation du mod`ele et des donn´ees
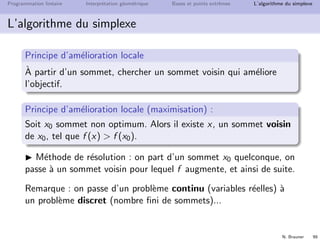
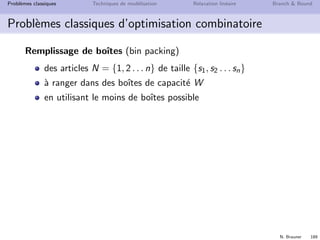
Dans l’exercice confiture, s´eparer les donn´ees du mod`ele
D´eclaration des donn´ees dans le fichier mod`ele
Produits {string} Produits =
{rhubarbe, fraise, sucre} ;
Pots {string} Pots =
{ConfRhubarbe, ConfFraise};
Profit int Profit[Pots] = [3, 5];
Besoin int Besoin[Pots][Produits] =
[[1, 0, 3],[0, 2, 2]] ;
Quantit´es dispo. int Dispo[Produits] = [4, 12, 18] ;](https://image.slidesharecdn.com/ro-160425234515/85/RECHERCHE-OPERATIONNELLE-SEMESTRE-6-233-320.jpg)
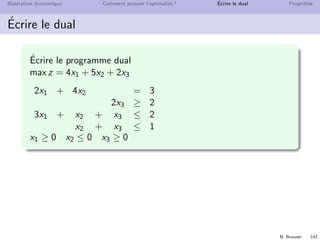
![N. Brauner 251
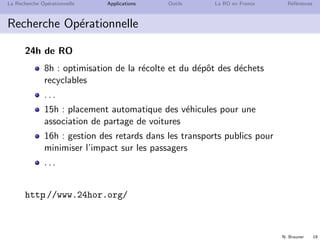
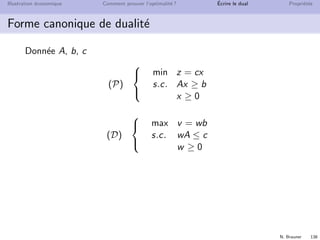
Pr´esentation des outils Mod`eles L’environnement Donn´ees Application
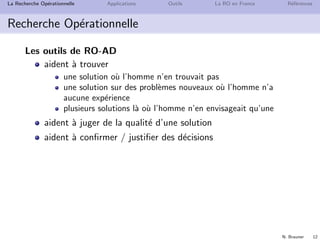
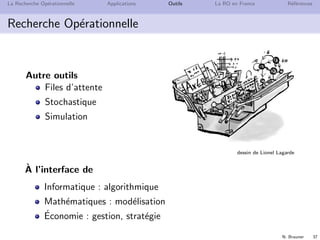
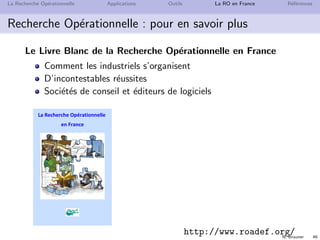
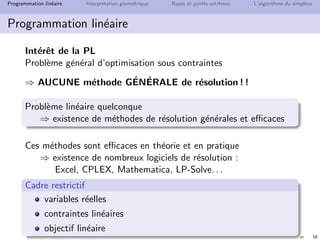
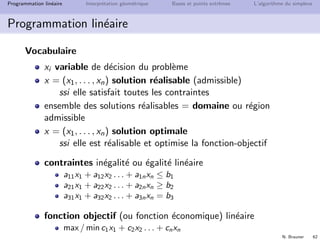
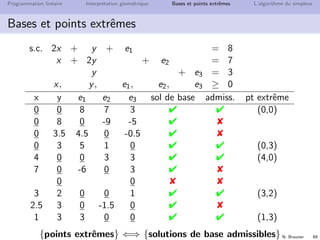
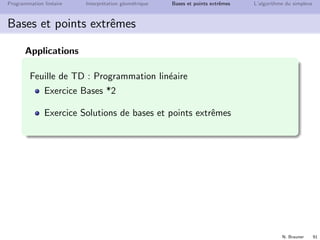
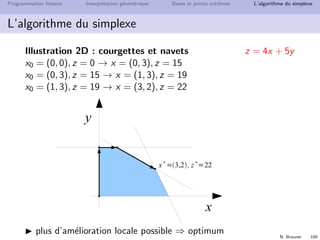
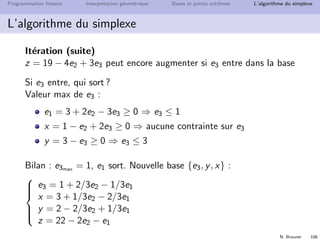
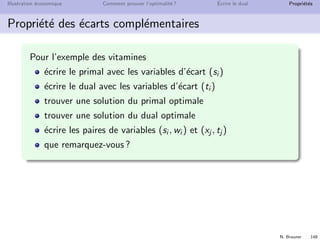
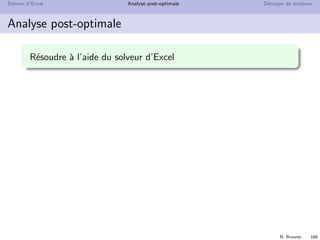
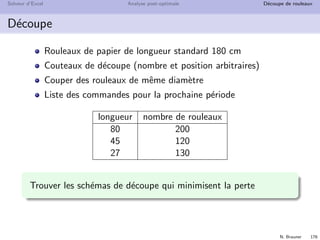
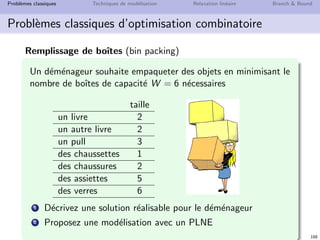
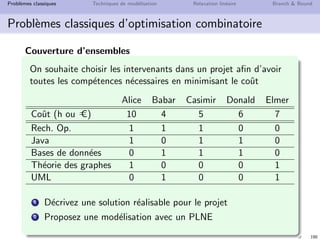
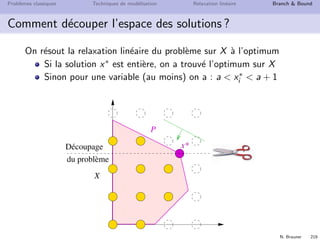
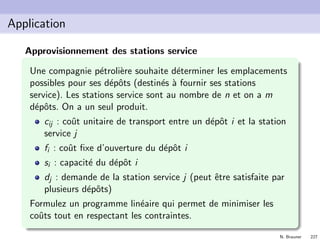
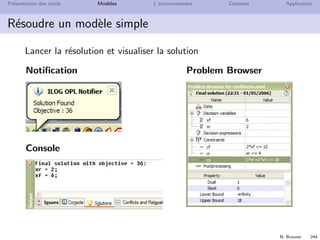
S´eparation du mod`ele et des donn´ees
D´eclaration des contraintes
constraint cap[Produits] ;
D´eclaration des variables de d´ecision
dvar float+ x[Pots] ;
Objectif : maximiser le profit
maximize sum(po in Pots) Profit[po]*x[po] ;
Contraintes : respecter les quantit´es disponibles
subject to{
forall (pr in Produits)
cap[pr]: sum(po in Pots)
Besoin[po][pr]*x[po] = Dispo[pr] ;
}](https://image.slidesharecdn.com/ro-160425234515/85/RECHERCHE-OPERATIONNELLE-SEMESTRE-6-234-320.jpg)
![N. Brauner 252
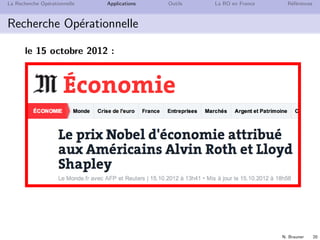
Pr´esentation des outils Mod`eles L’environnement Donn´ees Application
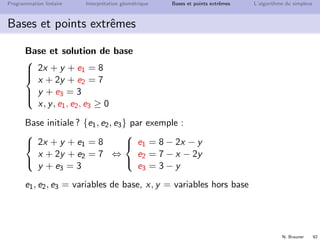
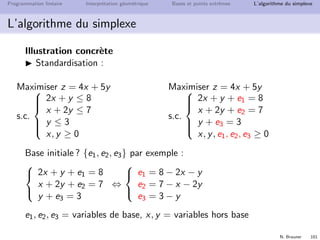
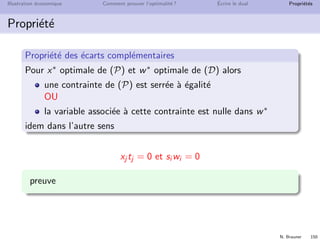
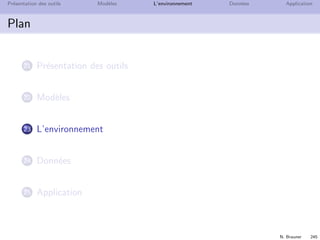
S´eparation du mod`ele et des donn´ees
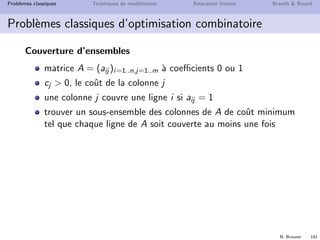
Dans l’exercice confiture, saisir les donn´ees dans un fichier .dat
D´eclaration des donn´ees dans un fichier .dat
Produits = {rhubarbe, fraise, sucre} ;
Pots = {ConfRhubarbe, ConfFraise};
Besoin = [
ConfRhubarbe:[1, 0, 3],
ConfFraise:[0, 2, 2]
] ;
Profit = [3, 5];
Dispo = [4, 12, 18] ;](https://image.slidesharecdn.com/ro-160425234515/85/RECHERCHE-OPERATIONNELLE-SEMESTRE-6-235-320.jpg)
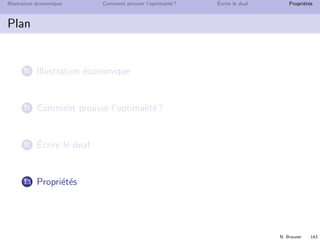
![N. Brauner 253
Pr´esentation des outils Mod`eles L’environnement Donn´ees Application
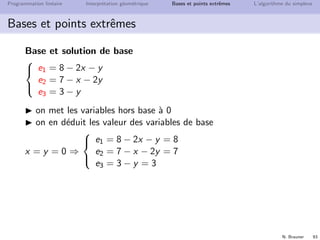
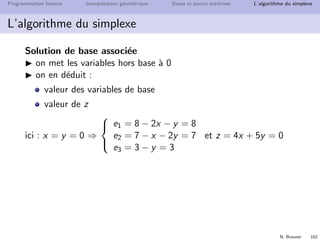
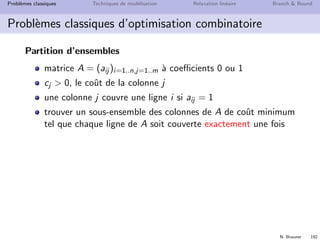
S´eparation du mod`ele et des donn´ees
D´eclaration de donn´ees externes dans un mod`ele
{string} Produits = ... ;
{string} Pots = ...;
int Besoin[Pots][Produits] = ...;
int Profit[Pots] = ...;
int Dispo[Produits] = ...;
Ajouter le fichier de donn´es au projet
Ajouter le fichier de donn´ees `a la configuration](https://image.slidesharecdn.com/ro-160425234515/85/RECHERCHE-OPERATIONNELLE-SEMESTRE-6-236-320.jpg)
![N. Brauner 258
Pr´esentation des outils Mod`eles L’environnement Donn´ees Application
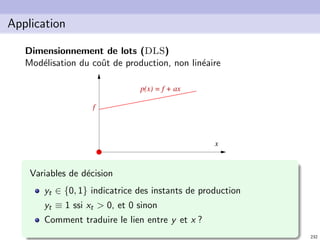
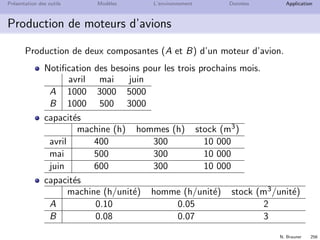
Production de moteurs d’avions
Variables
production : x[produit, mois]
stock : s[produit, mois]
heures suppl´ementaires I[mois]
Objectif : production + stock + heures suppl´ementaires
Contraintes
d´efinition du stock
stock minimum fin juin
capacit´es des machines
capacit´es des hommes
capacit´es des stocks
d´efinition des heures suppl´ementaires](https://image.slidesharecdn.com/ro-160425234515/85/RECHERCHE-OPERATIONNELLE-SEMESTRE-6-241-320.jpg)




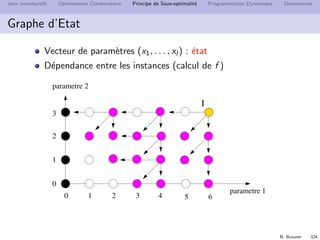
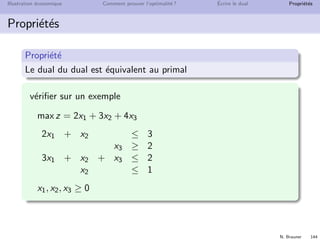
![N. Brauner 327
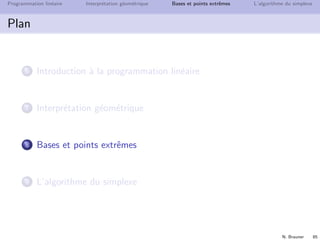
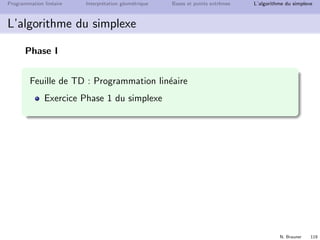
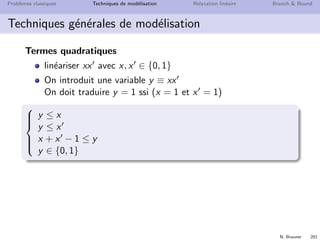
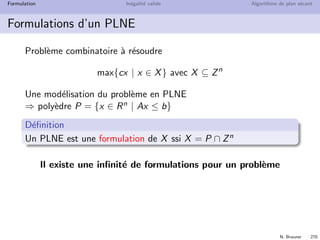
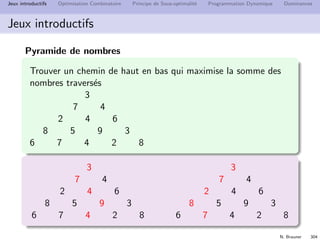
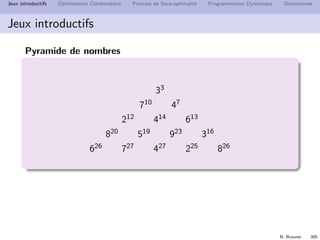
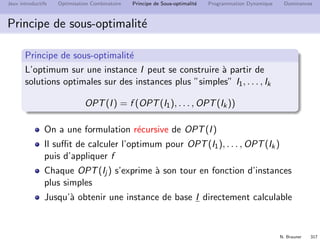
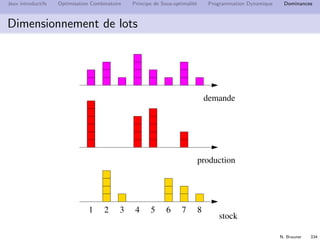
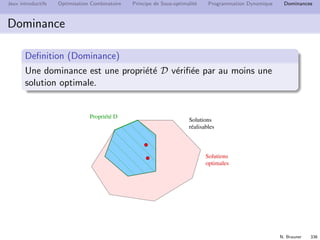
Jeux introductifs Optimisation Combinatoire Principe de Sous-optimalit´e Programmation Dynamique Dominances
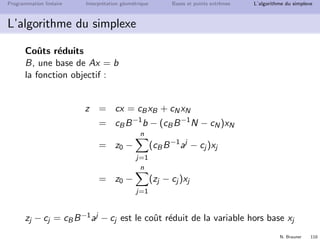
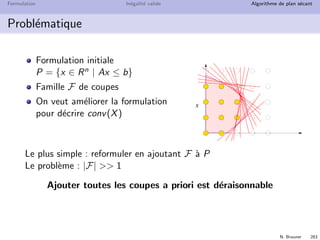
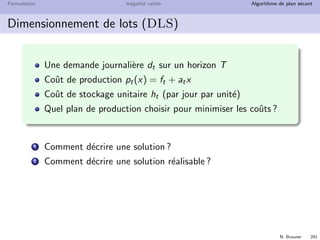
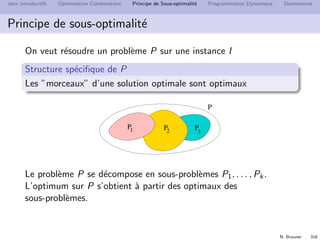
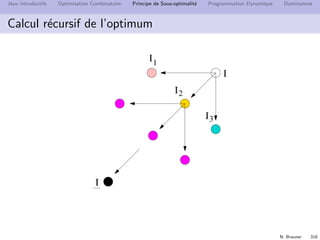
Programmation Dynamique
Un ´etat peut ˆetre calcul´e un tr`es grand nombre de fois
Id´ee : on d´er´ecursive
On m´emorise les ´etats au lieu de les recalculer
Il suffit de parcourir les ´etats dans un ordre topologique
inverse du graphe d’´etat
Evaluer les ´etats de base OPT[0, . . . , 0].
Parcourir les ´etats jusqu’`a ¯X
Pour chaque ´etat X, d´ependant de
X1, . . . , Xk d´ej`a ´evalu´es, m´emoriser
OPT[X] = f (OPT[X1], . . . , OPT[Xk ))
Retourner OPT[ ¯X]](https://image.slidesharecdn.com/ro-160425234515/85/RECHERCHE-OPERATIONNELLE-SEMESTRE-6-310-320.jpg)

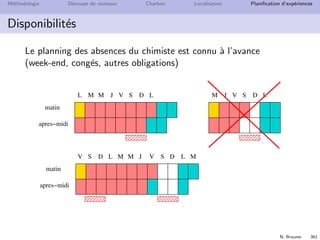

Le cours sur la recherche opérationnelle, animé par Nadia Brauner et ses collaborateurs, présente les applications et outils de cette discipline qui aide à résoudre des problèmes complexes liés à la gestion des systèmes. Il aborde des concepts théoriques ainsi que des exemples pratiques dans divers domaines tels que la logistique, la finance et l'optimisation des ressources. La recherche opérationnelle est présentée comme une intersection entre mathématiques et informatique, offrant des méthodes quantifiables pour améliorer la prise de décision.












































![Comptabilité générale s2_régularisations[LEARNECONOMIE.BLOGSPOT.COM]](https://cdn.slidesharecdn.com/ss_thumbnails/comptabilitgnrales2rgularisationsfsjes-tanger-160504220635-thumbnail.jpg?width=640&height=640&fit=bounds)
![Qcm droits des affaires s5 de bien[learneconomie.blogspot.com]](https://cdn.slidesharecdn.com/ss_thumbnails/qcmdroitsdesaffairess5debienlearneconomie-160507122753-thumbnail.jpg?width=640&height=640&fit=bounds)
![Examen de terminologie s2 2015 [learneconomie.blogspot.com]](https://cdn.slidesharecdn.com/ss_thumbnails/examendeterminologies22015learneconomie-160508122549-thumbnail.jpg?width=640&height=640&fit=bounds)












![Microeconomie s1 [www.learneconomie.blogspot.com]](https://cdn.slidesharecdn.com/ss_thumbnails/microeconomies1www-160515214641-thumbnail.jpg?width=640&height=640&fit=bounds)




















