Télécharger en tant que PDF, PPTX




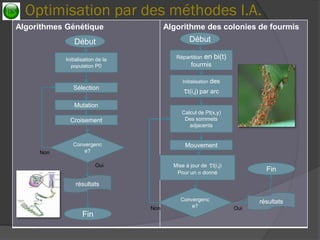
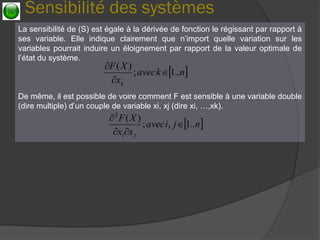

Le document traite des fondements et méthodologies de la recherche opérationnelle (RO), qui vise à optimiser le fonctionnement des systèmes par des approches scientifiques. Il couvre différents domaines tels que la théorie des systèmes, des graphes, l'optimisation des systèmes linéaires et non-linéaires, ainsi que l'utilisation des algorithmes d'intelligence artificielle pour l'optimisation. En conclusion, il souligne l'importance d'une interaction efficace avec les systèmes environnants pour améliorer les performances et réduire les pertes.























































































