Téléchargé 76 fois






![Systèmes représentation des données
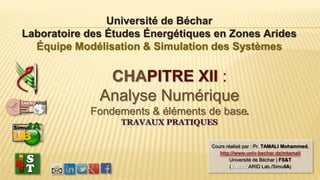
La mémoire centrale est un ensemble de ’positions binaires’ nommées bits. Les bits sont
généralement regroupés en octets (8 bits) et chaque octet est repéré par son adresse. Chaque
information devra être codée sous cette forme binaire.
En informatique,
le kilo vaut 1K = 210 = 1024
le méga vaut 1M = 220 = 1048576
le giga vaut 1G = 230 = 1073741824
Les nombres entiers dont la représentation et la manipulation sont celles de l’arithmétique usuel. Il
existe un plus grand entier représenté en machine. Pour ceux à 32 bits (=4 octets) correspond à
des entiers en double précision ont pour valeur dans [−231,231−1] = [−2G, 2G−1].
Les nombres flottants qui représentent les nombres réels ou les nombres décimaux.
Les nombres réels sont représentés de façon approximative en mémoire (représentation en virgule
flottante), avec la convention standardisée de la forme m×2e, où m est la mantisse 1≤m≤2 et e
l’exposant.
Représentation en simple précision. Sur 32 bits (4 octets), on a p=23, q=8 (1 bit pour le signe) ce
qui permet de représenter des nombres compris, en valeur absolue, entre 2−128≈10−38 et 2128≈1038
car 128=2q=28. La précision machine est de 7 chiffres décimaux significatifs car 223=107.
11](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-11-320.jpg)



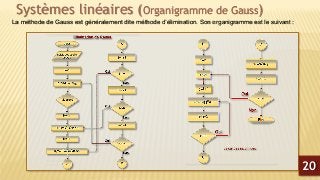
![Systèmes linéaires
Soit le programme équivalent en FORTRAN 95
PROGRAM Gauss
! Solution d’un system de N équations linéaires
! Forme matricielle A.X = B
! Déclaration des variables utilisées.
PARAMETER (IN=20)
REAL*8:: A(IN,IN), X(IN), B(IN), F, SUM1
INTEGER:: K, I, J, N, IN
! Lecture et saisie des coefficients de A et de C
PRINT *, "Introduire le nombre d‘équations (N):"
READ (5,*) N
PRINT *,"Introduire les coefficients de la matrice [A(I,J)]:"
READ (5,*) ((A(I,J),J=1,N),I=1,N)
PRINT *,"Introduire les composantes du vecteur [B(I)]:"
READ (5,*) (B(I),I=1,N)
! Décomposition (Elimination)
DO K = 1, N-1
DO I = K+1, N
F = A(I,K)/A(K,K)
15](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-15-320.jpg)
![Systèmes linéaires
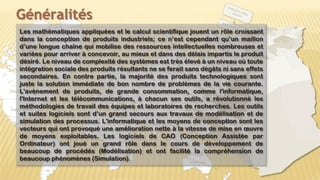
La manipulation sous OCTAVE (mode commande en ligne)
octave:##> A=[1 1;2 -3]
octave:##> b=[3 5]‘ %l’apostrophe-transposé
octave:##> inv(A)*b
ans =
2.8000
0.2000
octave:##>> A*ans %Pour vérifier
ans =
3.0000
5.0000
octave:##> Ab %L’antislash
ans =
2.8000
0.2000
La condition nécessaire pour que le système ait une solution est que le déterminant soit différent de zéro.
Vérifier avec :
A=[1 1 1; 2 0 3; 3 1 4] et b = [ 2 5 6]T
A=[1 1; 1 1.01]; b=[2; 2.01]; (On changera A(1,2)=1.005;)
On utilisera les fonctions det, rank, pinv et cond, Discuter.
Exécution du
programme Gauss
17](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-17-320.jpg)
![Systèmes linéaires
La manipulation sous OCTAVE (mode commande en ligne)
>> A=[1 1 1; 2 0 3; 3 1 4]
A =
1 1 1
2 0 3
3 1 4
>> det(A)
ans = 5.5511e-016
>>rank(A)
ans = 2
>> A=[1 1; 1 1.01]
A =
1.0000 1.0000
1.0000 1.0100
>> b=[2; 2.01]
b =
2.0000
2.0100
>> cond(A)
ans = 402.01
La condition nécessaire pour que le système ait une solution est que le déterminant
soit différent de zéro. Vérifier avec :
A=[1 1 1; 2 0 3; 3 1 4] et b = [ 2 5 6]T
A=[1 1; 1 1.01]; b=[2; 2.01]; (On changera A(1,2)=1.005;)
On utilisera les fonctions det, rank, pinv et cond, Discuter.
18](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-18-320.jpg)
![Systèmes linéaires
La manipulation sous OCTAVE (mode commande en ligne)
>> A=[1 1 1; 2 0 3; 3 1 4]
A =
1 1 1
2 0 3
3 1 4
>> b = [2 5 6]'
b =
2
5
6
>> x=pinv(A)*b
x =
0.69048
-0.11905
1.09524
>> x=inv(A)*b
warning: matrix singular to machine precision, rcond = 1.15648e-017
x =
-5.4043e+015
1.8014e+015
3.6029e+015
>> rank(A)
ans = 2
La condition nécessaire pour que le système ait une solution est que le déterminant
soit différent de zéro, vérifier avec :
A=[1 1 1; 2 0 3; 3 1 4] et b = [ 2 5 6]T
A=[1 1; 1 1.01]; b=[2; 2.01]; (On changera A(1,2)=1.005;)
On utilisera les fonctions
det calcul du déterminant
rank Rang de la matrice
pinv Pseudo-Inversion de la matrice
cond conditionner une matrice.
19](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-19-320.jpg)

![Systèmes linéaires (Programme Gauss-Jordan F95-F90)
program gauss_Jordan
integer::i,j,n,k
real::pivot,s
real,allocatable::a(:,:)
real,allocatable::b(:)
! Lecture et saisie des coefficients de A et de C
PRINT *, "Introduire le nombre d'equations (N):"
READ (5,*) N
allocate(A(N,N),B(N))
PRINT *,"Introduire les coefficients de la matrice
[A(I,J)]:"
READ (5,*) ((A(I,J),J=1,N),I=1,N)
PRINT *,"Introduire les composantes du vecteur
[B(I)]:"
READ (5,*) (B(I),I=1,N)
do k=1,N,1
do i=1,n,1
if (k==i) then
pivot=a(i,k)
do j=k,n,1
a(i,j)=(a(i,j))/(pivot)
end do
b(k)=(b(k))/(pivot)
else
pivot=a(i,k)
do j=k,n,1
a(i,j)=a(i,j)-pivot*a(k,j)
end do
b(i)=b(i)-pivot*b(k)
end if
end do
end do
!calcul de la solution
do i=n,1,-1
do j=i-1,1,-1
s=a(j,i)
do k=j,n,1
a(j,k)=a(j,k)-s*a(i,k)
end do
b(j)=b(j)-s*b(i)
end do
end do
do i=1,n,1
write(*,*) "x)",i,")=",b(i)
end do
write(*,*)« Matrice identité"
write(*,*) a
end program gauss_Jordan 22](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-22-320.jpg)

![Systèmes linéaires (Programme Gauss-Jordan F95-F90)
Pour le problème suivant :
x1 – x2 + 2x3 = 5
3x1 + 2x2 + x3 = 10
2x1 - 3x2 - 2x3 = -10
Et dont la solution est :
x1 = 1
x2 = 2
x3 = 3
Pour le problème suivant :
2x1 + x2 - x3 = 8
-3x1 - x2 + 2x3 = -11
-2x1 + x2 + 2x3 = -3
Et dont la solution est :
x1 = 2
x2 = 3
x3 = -1 Sous Octave
Sous CodeBlock
>> a=[2 1 -1; -3 -1 2; -2 1 2]
a =
2 1 -1
-3 -1 2
-2 1 2
>> x = mldivide(a,b)
x =
2.00000
3.00000
-1.00000 24](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-24-320.jpg)

![Systèmes linéaires (Méthodes itératives)
Soit à résoudre un système linéaire de n équations à n inconnues, ceci consiste à trouver n nombres, réels
ou complexes, x1, · · · , xn, tels que :
a11x1 + a12x2 + · · · + a1nxn = b1
a21x1 + a22x2 + · · · + a2nxn = b2
. . .
an1x1 + an2x2 + · · · + annxn = bn
Beaucoup de méthodes dont la stratégie est de commencer par un vecteur estimé initial et ainsi faire des
traitements du système à cette base (estimé initial X0) pour en déduire la solution rechechée.
(b1 - a12x2 + · · · + a1nxn)/a11 = x1
(b2 - a21x1 + · · · + a2nxn)/a22 = x2
. . .
(bn - an1x1 + an2x2 + · · · + ann-1xn-1)/ann = xn
Ou
(b1 - {j; j[1,n]/j1}a1jxj)/a11 = x1
(b2 - {j; j[1,n]/j2}a2jxj)/a22 = x2
. . .
(bn - {j; j[1,n]/jn}anjxj)/ann = xn
La formule résumée est donnée par
(bi - {j; j[1,n]/ji}aijxj)/ai,i = xi 26](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-26-320.jpg)
![Systèmes linéaires (Méthodes itératives- méthode Gauss-Seidel)
Donc pour un estimé initial à k=0 donc X0=(x0
1, · · · , x0
n)T, nous avons :
(bi - {j; j[1,n]/ji}aijx(k)
j)/ai,i = xi
(k+1)
Pour k, nous pouvons espérer satisfaire les transformations successives qui améliorerons la recherche
du vecteur solution X(k) en dépendance de valeurs précédentes du vecteur estimé X(k-1).
L’algorithme global de la méthode est donné dans l’encadré suivant.
La condition d’arrêt du phénomène de transformation est définie par :
|X(k) – X(k-1)|11 ou |(X(k) – X(k-1))/X(k)|21 avec 1 et 2 des valeurs réelles petites.
1: Début
2: Lecture de la matrice des coefficients A et du vecteur second membre b
3: Lecture de Eps1
4: Proposition de l’estimé initial X0
5: k=0
6: Sauvegarde de Xs=X(k)
7: Pour i=1 jusqu’à n
(bi - {j; j[1,n]/ji}aijx(k)
j)/ai,i = xi
(k+1)
8: Fin de pour
9: xmax=max{|X(k+1)-X(k)|}
10: Si xmax1 alors Impression de X(k+1); Arrêt
11: Sinon aller à (7) 27](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-27-320.jpg)
![Systèmes linéaires (Méthodes itératives- méthode Gauss-Seidel)
Donc pour un estimé initial à k=0 donc X0=(x0
1, · · · , x0
n)T, nous avons :
(bi - {j; j[1,n]/ji}aijx(k)
j)/ai,i = xi
(k+1)
Pour k, nous pouvons espérer satisfaire les transformations successives qui améliorerons la recherche
du vecteur solution X(k) en dépendance de valeurs précédentes du vecteur estimé X(k-1).
L’algorithme global de la méthode est l’encadré suivant.
La condition d’arrêt du phénomène de transformation est définie par :
|X(k) – X(k-1)|11 ou |(X(k) – X(k-1))/X(k)|21 avec 1 et 2 des valeurs réelles petites.
Program Gseidel
parameter(ITERMAX=500) ! Nombre maximal des itérations
Integer:: N, Iter, i, j, Sol
Real,allocatable:: A(:,:)
Real,allocatable:: X(:), B(:)
Real Xs, Dmax, Eps
! Lecture et saisie des coefficients de A et de C
PRINT *, "Introduire le nombre d‘équations (N):"
READ (*,*) N
allocate(A(N,N),B(N),X(N))
PRINT *,"Introduire les coefficients de la matrice [A(I,J)]:"
READ (*,*) ((A(I,J),J=1,N),I=1,N)
28](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-28-320.jpg)
![Systèmes linéaires (Méthodes itératives- méthode Gauss-Seidel)
PRINT *,"Introduire les composantes du vecteur [B(I)]:"
READ (*,*) (B(I),I=1,N)
! Saisie de l’estimé initial
PRINT *,"Introduire le vecteur estime initial [X(0)]:"
READ (*,*) (X(I),I=1,N)
PRINT *,"Introduire la valeur du Epsilon"
READ (*,*) Eps
! Initialisation des itérations
Iter=0
Dmax=0.
Sol=2
do while (Sol == 2)
Do i=1,N
Xs = X(i)
S=0
Do j=1,N
If (j /= i) then
S = S + A(i,j)*X(j)
End if
End do
X(i) = (B(i)-S)/A(i,i)
Xs = ABS(X(i) - Xs)
… Suite
29](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-29-320.jpg)

![Systèmes non-linéaires (Méthode variationnelle)
PRINCIPE DE LA LINEARITE DES SYSTEMES
Principe de proportionnalité : si s(t) est la réponse à l'entrée e(t)
alors λ*s(t) est la réponse à l'entrée λ*e(t).
Principe de superposition : si s1(t) est la réponse à l'entrée e1(t)
et s2(t) est la réponse à l'entrée e2(t) alors [s1(t) + s2(t)] est la
réponse à l'entrée [e1(t) + e2(t)].
Allure de la courbe d’un SNL : pour un système NON linéaire,
en régime nominal (en fonctionnement normal et sans
excitation perturbatrice), la courbe s = f(e) n’est pas une
droite. Un système SNL est continu, par opposition à un SNL
dit discret, lorsque les variations de ses composantes sont
continûment observable dans le cadre de son domaine de
définition δ.
Un système est invariant (stationnaire) si ses caractéristiques
sont insensibles aux changements du temps.
selon ces faits, le système linéaire SL reflète les mêmes
réactions indépendamment du temps.
La forme d’équation donnée par :
f(X) = C
Est dite non linéaire si elle n’est pas une application linéaire
vérifiant les condition de superposition et de proportionnalité.
L'équation est dite homogène si C=0.
Le définition f(X)=C est très générale au même moment que X
peut être toute composante du système sensible
mathématiquement (nombre, vecteur, fonction, … etc.), et
l’expression de f(X) peut avoir littéralement beaucoup de
formes, une forme récurrente, l'intégrale ou différentielle avec
association de contraintes (telles que les valeurs
initiales/limites). Si f(x) contient une différenciation par rapport
à X, le résultat sera une équation différentielle.
Une équation algébrique (polynomiale) non linéaire
donnée par
a.x3+b.x-3=0
Une équation non linéaire itérative est toujours la
résultante d’une écriture de type :
u(k+1) = g(u(k))
Une équation différentielle, quant à elle est donnée
par :
du/dx=-A*u3.
32](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-32-320.jpg)
![Systèmes non-linéaires (Méthode variationnelle)
Modélisation d’un système d’équation non-linéaires
Soit F={fi; i[1, m]} un système de fonctions non linéaires des n variables xk (tel que k[1, n]) définit dans un
domaine D résultant de l’union de p sous-domaine dj, D={dj; j[1, p]}.
On définit par :
F(X)=K un problème non linéaire (SNL) à résoudre. Si K est équivalente au vecteur 0, F est dit homogène. Si C
est l’ensemble des ci contraintes définies, chacune sur un domaine dj. F(X) peut être régit par C, dans ce cas on
parle de problème non linéaire contraint.
Dans le cas où le paramètre K est égal 0 et C est vide (C=), F(X) admet des zéros A(a0, a1, …, an) dans D.
Par la méthode de Newton-Raphson (NR), nous admettons, qu’autour d’un point X0, F(X) peut être explicitée par
son développement limité au sens Taylor et dont la forme est :
F(X0+DX0) F(X0)+(1/1!).[F(X)X=Xo].X0+…+(X0)
D’où X0 est la plus bonne estimation de X* (solution exacte du problème), F(X) est dite NABLA F, Gradient du
système de fonctions fi, X0 étant l’écart entre X* et X0 et finalement (X0) représente le reste de Taylor,
regroupe les dérivées d’ordres supérieur à 1 jusqu’à (l’infini).
Si l’estimation est justifiée, (X0) tendra vers 0, puisque les termes 1/n! tend vers 0 (pour n≥2) quant n.
De ce fait on garde seulement la partie;
F(X0+X0) F(X0)+(1/1!).[F(X)X=Xo].X0, (X0) 0
Et puisque F(X) est supposée égale à 0, nous aurons
F(X0)+(1/1!).[F(X)X=Xo].X0 0 [F(X)X=Xo].X0 - F(X0)
Si on note (F(X)X=Xo)=J(X0) on a J(X0).X0 - F(X0) d’où X0 - [J(X0)]-1.F(X0) et X = X0+X0.
33](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-33-320.jpg)
![Systèmes non-linéaires (Méthode variationnelle)
Formalisation
Pour un système F(X)=f(x)=0 (Cas de système à une fonction à une variable), nous avons :
f(x) = 0 f(x) = f(x0 + h) ≈ f(x0) + (f(x))’
(x0) .h, avec h=(x-x0).
x ≈ x0 + h ≈ x0 + f(x0)/(f(x0))’
Graphiquement, L’estimé initial est pris comme première
approximation de la solution, alors, par récurrence h est
recalculer de manière à corriger (par une quantité h f(x0)/(f(x0))’)
pour un sens de déplacement pour ainsi atteindre la solution.
De manière générale, nous calculerons J(X0) dite matrice
Jacobéenne du système.
X = X0 + X0 = X0 + (- [J(X0)]-1.F(X0)])
La formule de récurence donne les estimés successifs;
Xk+1 = Xk + Xk = Xk + (- [J(Xk)]-1.F(Xk)])
Le calcul est arrêté si et seulement si Xk tend vers zéro ou est
assimilable à une petite valeur 1 en valeur absolue (|Xk| 1).
ou encore (|Xk / Xk+1| 2). Ces deux conditions sont dites CONDITIONS D’ARRET, et le
déterminant de
de J est Jacobéen (|J(X)|). 34](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-34-320.jpg)
![Systèmes non-linéaires (Méthode variationnelle)
Problème type :
Un fournisseur de service GSM veut développer une nouvelle stratégie en faveur de ses
clients de marque. Pour cela, il pensa à vérifier si les emplacements de ses cellules
(antennes et équipements afférents) sont dans les recommandations optimales de
localisation. La répartition de ses clients dépend des localités où ceux-ci exercent leur
activités. La nouvelle stratégie consiste à favoriser le client selon un profil des activités
contractées et en cours avec le fournisseur. Pour cela, répartir les antennes d’une
manière optimale selon la distance la plus courte possible des clients en question.
Formalisation
D={dip} : Vecteurs des distances qui séparent les différents antennes ai de l’antenne
principale ap(au nombre de m composantes)
xi ,yi : étant les coordonnées du point ai d’une antenne. La distance est donnée par :
dij = ([(xj-xi)2+(yj-yi)2]^(1/2)) : distance d’un point i à un point j
S=dij
2 : Somme des distances à minimiser représente la fonction à optimiser.
Conditions de couverture, zone d’ombre (conditions techniques)
Représentation graphique du problème de la
localisation optimale des antennes.
Exemple d’antenne utilisées pour les GSM.
35
Processus de convergence des valeurs
de x vers la solution x*](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-35-320.jpg)
![Systèmes non-linéaires (Méthode variationnelle)
Problème type :
Un fournisseur de service GSM veut développer une nouvelle stratégie en faveur de ses
clients de marque. Pour cela, il pensa à vérifier si les emplacements de ses cellules
(antennes et équipements afférents) sont dans les recommandations optimales de
localisation. La répartition de ses clients dépend des localités où ceux-ci exercent leur
activités. La nouvelle stratégie consiste à favoriser le client selon un profil des activités
contractées et en cours avec le fournisseur. Pour cela, répartir les antennes d’une
manière optimale selon la distance la plus courte possible des clients en question.
36
L’algorithme NR est donné par :
1. Demander X0,
2. Mettre k=0
3. Répéter
4. Evaluer Xk+1 (à la précision désirée)
5. Si (f ’(Xk) = 0) alors Terminer
a) Xk=Xk+1
b) Xk+1 = Xk +(- [J(Xk)]-1.F(Xk)])
6. Tant que Xk≥
7. Afficher Xk+1
La méthode NR est l’une des méthode les plus simple à implémenter, très simple
d’utilisation et efficace numériquement. Beaucoup de variantes existent
(Fletcher-Powell, Bellman, …)
Isaac NEWTON
(1642 −1727)
Joseph Raphson
(1648-1715)
Processus de convergence des valeurs
de x vers la solution x*](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-36-320.jpg)
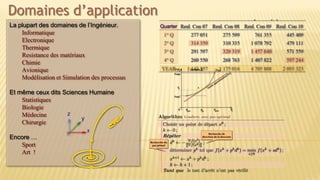
![program NR
! Déclaration
real, parameter::error =1e-4
integer::k
real::xo,x1,f,fd
! Debut du traitement
read*,xo
k=1
10 x1=xo-(f(xo)/fd(xo))
if (abs((x1-xo)/x1)<error)then
print*,"racine est égale a ", x1 , " obtenue en iteration=", k
else
xo=x1
k=k+1
goto 10
endif
End program NR
real function f(x)
real::x
f = x**3-x-1
End
real function fd(x)
real::x
fd = 3*x**2-1
End
Systèmes non-linéaires (Méthode variationnelle)
Cas de fonction à une variable :
Soit la fonction :
f(x)= x3-x-1
Il est nécessaire de décider sur le sort de
la valeur initiale afin de déterminer la
racine. L’illustration graphique peut dans
ce cas simple aider. On note que
f(1)=−1<0 alors que f(2)=5>0. Cependant,
la racine pour f(x)=0 doit existée dans
l’intervalle [1, 2].
Si on prend x0=1 en tant que valeur initial.
Nous pouvant déterminer la solution en
utilisant la méthode NR.
Selon la méthode NR, nous détermineront
que la racine de f est 1.324718 à 6
décimales.
37
Valeur initiale x0](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-37-320.jpg)
![program NR
real, parameter::error =1e-4
integer::k
real::xo,x1,f,fd
read*,xo
k=1
10 x1=xo-(f(xo)/fd(xo))
if (abs((x1-xo)/x1)<error)then
print*,“La racine est égale a “
print*, x1
print*, " obtenue en iteration=", k
else
xo=x1
print*,“Estime suivant “, x1, “ iteration=", k
k=k+1
goto 10
endif
End program NR
real function f(x)
real::x
f = x**3-x-1
End
real function fd(x)
real::x
fd = 3*x**2-1
End
Systèmes non-linéaires (Méthode variationnelle)
Cas de fonction à une variable :
Soit la fonction :
f(x)= x3-x-1
Il est nécessaire de décider sur le sort de
la valeur initiale afin de déterminer la
racine. L’illustration graphique peut dans
ce cas simple aider. On note que
f(1)=−1<0 alors que f(2)=5>0. Cependant,
la racine pour f(x)=0 doit existée dans
l’intervalle [1, 2].
Si on prend, maintenant x0=4 en tant que
valeur initial. Nous pouvant déterminer la
solution en utilisant la méthode NR.
Nous aurons 1.324718 comme racine de f.
Valeur initiale x0
38](https://image.slidesharecdn.com/o85vvkpqvo9xdpdapnjd-signature-17a36ebb541a4b765b3213b2578ca26f1dfc1c6fef7e03cea5355ac4cdeb15e0-poli-160215182050/85/Chap-XII-Analyse-Numerique-38-320.jpg)


Le document présente l'Université de Béchar et son laboratoire d'études énergétiques en zones arides, soulignant ses équipes de recherche et les domaines d'application de la modélisation et de la simulation. Il décrit également les concepts clés liés aux systèmes, aux méthodes de résolution d'équations et les enjeux liés à l'évaluation des performances. Enfin, le texte aborde les outils logiciels utilisés pour la modélisation et simulation, ainsi que les défis des calculs numériques.









![[DL輪読会]マルチエージェント強化学習と⼼の理論 〜Hanabiゲームにおけるベイズ推論を⽤いたマルチエージェント 強化学習⼿法〜](https://cdn.slidesharecdn.com/ss_thumbnails/0917imai1-210917021923-thumbnail.jpg?width=640&height=640&fit=bounds)











![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Encoder-Decoder with Atrous Separable Convolution for Semantic Image S...](https://cdn.slidesharecdn.com/ss_thumbnails/deeplabv3-180309001425-thumbnail.jpg?width=640&height=640&fit=bounds)



































































