Le document présente une étude approfondie du processeur Intel 8086, comprenant son architecture, son jeu d'instructions, ainsi que des notions de programmation en assembleur. Il détaille les registres, les modes d'adressage et les instructions disponibles pour la manipulation de données. Ce chapitre est destiné à aider les étudiants en informatique à comprendre le fonctionnement des processeurs Intel et la programmation bas niveau.
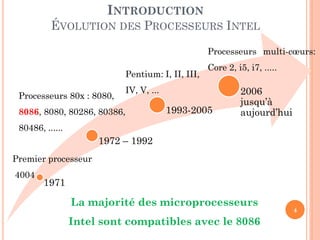
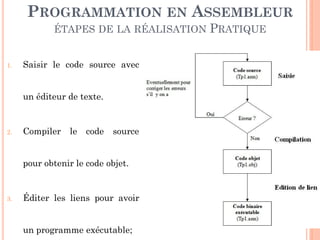
![ARCHITECTURE GÉNÉRALE DU PROCESSEUR 8086
REGISTRES DE
SEGMENT
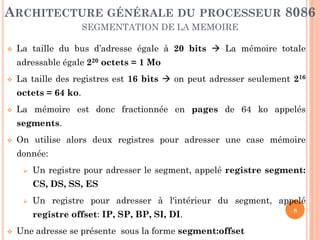
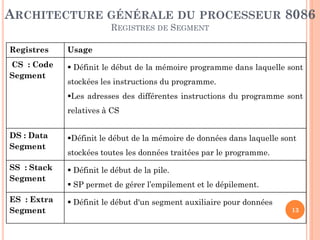
Ces registres sont combinés avec les registres offset (par exemple IP) pour
former les adresses. Une case mémoire est repérée par une adresse de la
forme [Rseg :Roff]
Le registre segment localise le début d’une zone mémoire de 64Ko
Le registre offset précise l’adresse relative par rapport au début de
segment.
12](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-12-320.jpg)
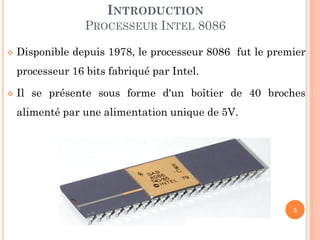
![ARCHITECTURE GÉNÉRALE DU PROCESSEUR 8086
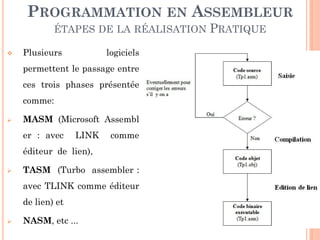
MODE D’ADRESSAGE
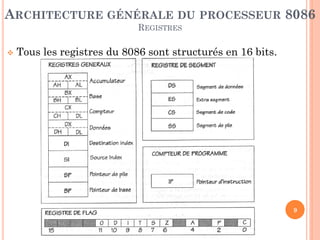
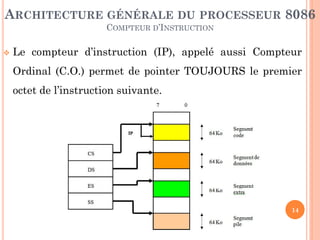
3. Adressage direct
Un des deux opérandes se trouve en mémoire. L’adresse
de la case mémoire est précisé directement dans
l’instruction.
INST R , [adr]
INST [adr] , R
INST taille [adr] , im
L’adresse doit être placée entre [Rseg:Roff]. Si le segment
(Rseg) n’est pas précisé, DS est pris par défaut.
20](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-20-320.jpg)
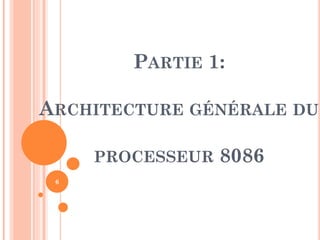
![ARCHITECTURE GÉNÉRALE DU PROCESSEUR 8086
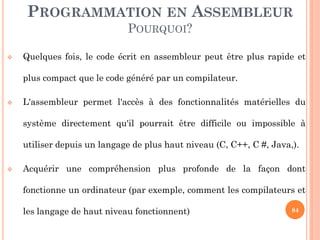
MODE D’ADRESSAGE
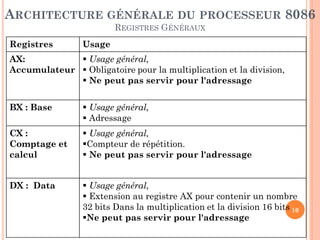
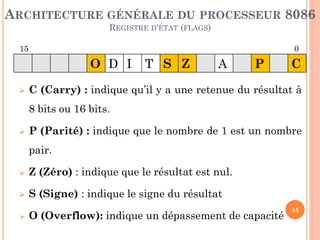
3. Adressage direct
INST R , [adr]
INST [adr] , R
INST taille [adr] , im
Exemples :
MOV AX,[243]
: Copier le contenu de la mémoire d'adresse
DS:243 dans AX
MOV [123],AX
: Copier le contenu de AX dans la mémoire
d'adresse DS:123
21
MOV AX, [SS:243] : Copier le contenu de la mémoire SS:243
dans AX](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-21-320.jpg)
![ARCHITECTURE GÉNÉRALE DU PROCESSEUR 8086
MODE D’ADRESSAGE
4. Adressage Indirect
Un des deux opérandes se trouve en mémoire. L’adresse se
trouve dans l’un de ces 4 registres BX, BP, SI ou DI.
INST R , [Rseg : Roff]
INST [Rseg : Roff] , R
INST taille [Rseg : Roff] , im
Si Rseg n'est pas spécifié, le segment par défaut sera
utilisé.
Registre
BX
BP
SI
DI
Segment par défaut
DS
SS
DS
DS
22](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-22-320.jpg)
![ARCHITECTURE GÉNÉRALE DU PROCESSEUR 8086
MODE D’ADRESSAGE
4. Adressage Indirect
Exemples :
MOV AX, [BX]; Charger AX par le contenu de la mémoire d'adresse
DS:BX
MOV AX, [BP]; Charger AX par le contenu de la mémoire d'adresse
SS:BP
MOV AX, [SI]; Charger AX par le contenu de la mémoire d'adresse
DS:SI
MOV AX, [DI] ; Charger AX par le contenu de la mémoire d'adresse
DS:DI
MOV AX,
23
[ES:BP]; Charger AX par le contenu de la mémoire
d'adresse ES:BP](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-23-320.jpg)
![ARCHITECTURE GÉNÉRALE DU PROCESSEUR 8086
MODE D’ADRESSAGE
4. Adressage Indirect
A. Adressage Basé
L’offset se trouve dans l’un des deux registres de base BX
ou BP. On peut préciser un déplacement qui sera ajouté
au contenu de Roff pour déterminer l’offset,
INST R , [Rseg : Rb+dep]
INST [Rseg : Rb+dep] , R
INST taille [Rseg : Rb+dep] , im
25](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-25-320.jpg)
![ARCHITECTURE GÉNÉRALE DU PROCESSEUR 8086
MODE D’ADRESSAGE
4. Adressage Indirect
A. Adressage Basé
Exemples :
MOV AX, [BX] : Charger AX par le contenu de la mémoire d'adresse
DS:BX
MOV AX, [BX+5] : Charger AX par le contenu de la mémoire d'adresse
DS:BX+5
MOV AX, [BP-200] : Charger AX par le contenu de la mémoire d'adresse
SS:BX-200
MOV AX, [ES:BP] : Charger AX par le contenu de la mémoire d'adresse
ES:BP
26](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-26-320.jpg)
![ARCHITECTURE GÉNÉRALE DU PROCESSEUR 8086
MODE D’ADRESSAGE
4. Adressage Indirect
B. Adressage Indexé
L’offset se trouve dans l’un des deux registres d’index SI
ou DI. On peut préciser un déplacement qui sera ajouté au
contenu de Ri pour déterminer l’offset.
INST R , [Rseg : Ri+dep]
INST [Rseg : Ri+dep] , R
INST taille [Rseg : Ri+dep] , im
27](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-27-320.jpg)
![ARCHITECTURE GÉNÉRALE DU PROCESSEUR 8086
MODE D’ADRESSAGE
4. Adressage Indirect
B. Adressage Indexé
Exemples :
MOV AX,
[SI]; Charger AX par le contenu de la mémoire
d'adresse DS:SI
MOV AX,
[SI+500]; Charger AX par la mémoire d'adresse
DS:SI+500
MOV AX, [DI-8]; Charger AX par la mémoire d'adresse DS:DI-8
MOV AX,
ES:SI+4
[ES:SI+4]; Charger AX par la mémoire d'adresse
28](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-28-320.jpg)
![ARCHITECTURE GÉNÉRALE DU PROCESSEUR 8086
MODE D’ADRESSAGE
4. Adressage Indirect
C. Adressage Basé Indexé
L'offset de l’adresse de l'opérande est la somme d'un
registre de base, d'un registre d'index et d'un déplacement
optionnel. Si Rseg n'est pas spécifié, le segment par défaut
du registre de base est utilisé :
INST R , [Rseg : Rb+Ri+dep]
INST [Rseg : Rb+Ri+dep] , R
INST taille [Rseg : Rb+Ri+dep] , im
29](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-29-320.jpg)
![ARCHITECTURE GÉNÉRALE DU PROCESSEUR 8086
MODE D’ADRESSAGE
4. Adressage Indirect
C. Adressage Basé Indexé
Exemples :
MOV AX,[BX+SI]; AX est chargé par la mémoire d'adresse
DS:BX+SI
MOV AX,[BX+DI+5]; AX est chargé par la mémoire d'adresse
DS:BX+DI+5
MOV AX,[BP+SI-8]; AX est chargé par la mémoire d'adresse
SS:BP+SI-8
30
MOV AX,[BP+DI]; AX est chargé par la mémoire d'adresse
SS:BP+DI](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-30-320.jpg)
![ARCHITECTURE GÉNÉRALE DU PROCESSEUR 8086
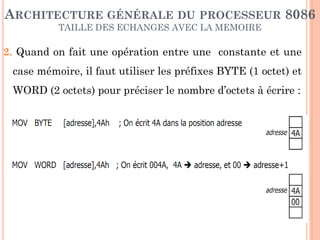
TAILLE DES ECHANGES AVEC LA MEMOIRE
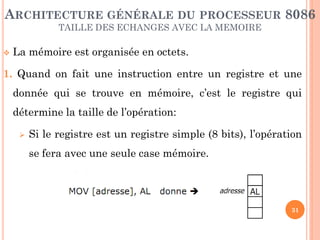
1.
Quand on fait une instruction entre un registre et une
donnée qui se trouve en mémoire, c’est le registre qui
détermine la taille de l’opération:
Si le registre est un registre double (2 octets),
l’opération se fera avec deux cases mémoires
MOV [adresse], AX donne
32](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-32-320.jpg)
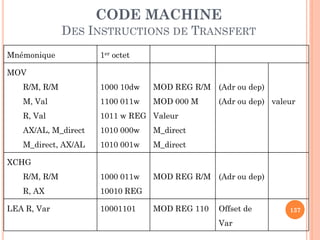
![INSTRUCTIONS DE TRANSFERT
MOV
MOV
Od,Os:
Copie
l'opérande
Source
(Os)
dans
l'opérande Destination (Od) [OdOS]
MOV R1 , R2
R1R2
MOV R , [adr]
R[adr]
MOV [adr] , R
[adr]R
MOV R , im
Rim
MOV taille [adr] , im
copier une constante dans une case mémoire
taille = BYTE ou WORD
MOV [adr], [adr]
MOV Rseg, Rseg
36](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-36-320.jpg)
![INSTRUCTIONS DE TRANSFERT
XCHG
XCHG Od,Os: Échange l'opérande Source (Os) avec
l'opérande Destination (Od) [OsOd].
XCHG R1 , R2
R1R2
XCHG [adr] , R
[adr]R
XCHG R , [adr]
XCHG [adr], [adr]
37](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-37-320.jpg)
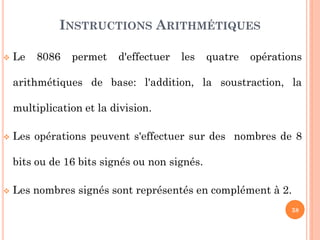
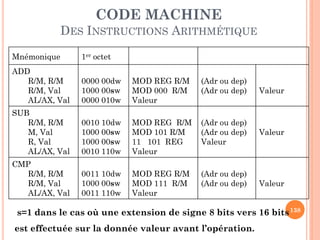
![INSTRUCTIONS ARITHMÉTIQUES
ADDITION
ADD Od,Os: additionne l'opérande source et l'opérande
destination et met le résultat dans l'opérande destination
[OdOd+Os].
ADD R1 , R2
R1 R1 + R2
ADD R , [adr]
R1 R + [adr]
ADD [adr] , R
[adr] [adr] + R
ADD R , im
R R + im
ADD taille [adr] , im
[adr] [adr] + im
ADD [adr], [adr]
39](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-39-320.jpg)
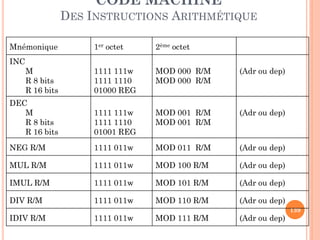
![INSTRUCTIONS ARITHMÉTIQUES
ADDITION
INC Op: incrémente l'opérande Op [Op Op+1].
INC R
R R+1
INC taille [adr]
Incrémenter le contenu d’une case mémoire
taille = BYTE ou WORD
Exemple: En partant de la situation mémoire illustrée, quelle est
la situation mémoire après l’exécution séquentielle des instructions
suivantes
INC BYTE [400h]
INC WORD [400h]
DS: 400 FE
33
40](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-40-320.jpg)
![INSTRUCTIONS ARITHMÉTIQUES
ADDITION
Exemple:
DS: 400 FE
33
INC BYTE [400h]
DS: 400
FF
33
INC WORD [400h]
DS: 400
00
Bits de poids faible
34
Bits de poids fort
41](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-41-320.jpg)
![INSTRUCTIONS ARITHMÉTIQUES
SOUSTRACTION
SUB Od,Os:
soustrait l'opérande source et l'opérande
destination et met le résultat dans l'opérande destination
[OdOd-Os].
SUB R1 , R2
R1 R1 - R2
SUB R , [adr]
R1 R - [adr]
SUB [adr] , R
[adr] [adr] – R
SUB R , im
R R - im
SUB taille [adr] , im
[adr] [adr] - im
SUB [adr], [adr]
42](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-42-320.jpg)
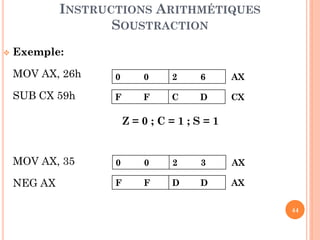
![INSTRUCTIONS ARITHMÉTIQUES
SOUSTRACTION
DEC Op: décrémente l'opérande Op [Op Op-1].
DEC R
DEC taille [adr]
R R-1
[adr] [adr] - 1
NEG Op: Remplace Op par son négatif
[Op0-Op = CA2 (Op)]
NEG R
R CA2(R)
NEG taille [adr]
[adr] CA2 ([adr])
43](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-43-320.jpg)
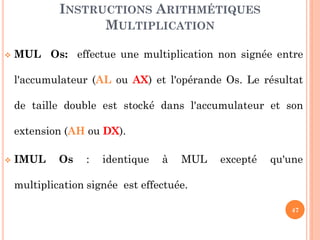
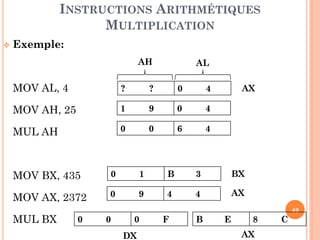
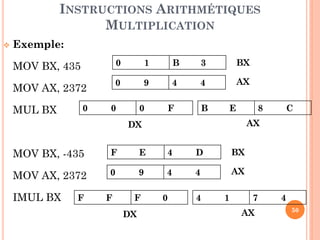
![INSTRUCTIONS ARITHMÉTIQUES
MULTIPLICATION
(I) MUL Reg8
AX AL * Reg8
(I) MUL BYTE [adr]
AX AL * [adr]
(I) MUL Reg16
DX:AX AX * Reg16
(I) MUL WORD [adr] DX:AX AX * [adr]
(I) MUL im
48](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-48-320.jpg)
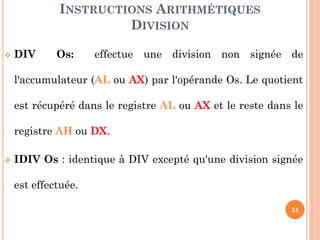
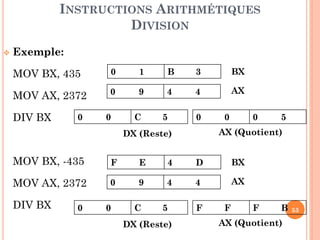
![INSTRUCTIONS ARITHMÉTIQUES
DIVISION
(I) DIV Reg8
AL Quotient
(I) DIV BYTE [adr]
AH Reste
(I) DIV Reg16
AX Quotient
(I) DIV WORD [adr]
DX Reste
(I) DIV im
52](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-52-320.jpg)
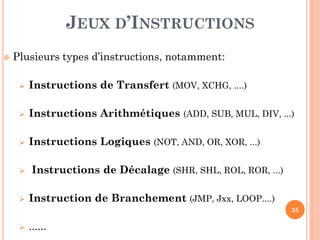
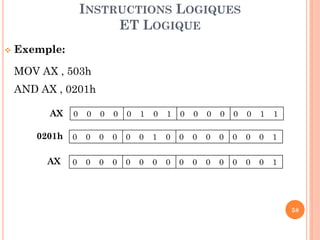
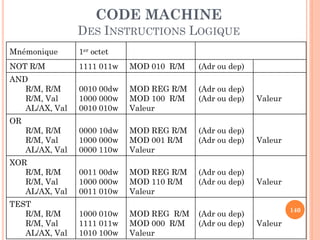
![INSTRUCTIONS LOGIQUES
NÉGATION
NOT OP transforme la valeur de l’opérande (registre ou
mot mémoire) en son complément à 1 [OPCA1(OP)].
Exemple:
AX
MOV AX, 96
0
0
6
0
NOT AX
F
F
9
F
56](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-56-320.jpg)
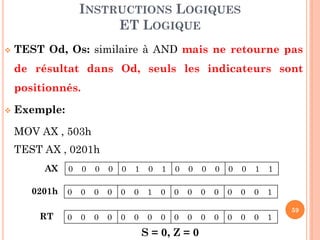
![INSTRUCTIONS LOGIQUES
ET LOGIQUE
AND Od, Os effectue un ET logique entre Od et Os.
[Od Od Os]
AND R1 , R2
R1 R1 R2
AND R , [adr]
R1 R [adr]
AND [adr] , R
[adr] [adr] R
AND R , im
R R im
AND taille [adr] , im
[adr] [adr] im
AND [adr], [adr]
57](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-57-320.jpg)
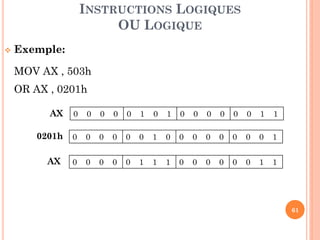
![INSTRUCTIONS LOGIQUES
OU LOGIQUE
OR Od, Os effectue un OU logique entre Od et Os.
[Od Od Os]
OR R1 , R2
R1 R1 R2
OR R , [adr]
R1 R [adr]
OR [adr] , R
[adr] [adr] R
OR R , im
R R im
OR taille [adr] , im
[adr] [adr] im
OR [adr], [adr]
60](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-60-320.jpg)
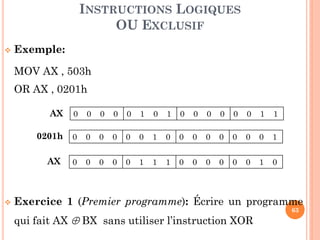
![INSTRUCTIONS LOGIQUES
OU EXCLUSIF
XOR Od, Os effectue un OU exclusif (XOR) entre Od et
Os [Od Od Os].
XOR R1 , R2
R1 R1 R2
XOR R , [adr]
R1 R [adr]
XOR [adr] , R
[adr] [adr] R
XOR R , im
R R im
XOR taille [adr] , im
[adr] [adr] im
XOR [adr], [adr]
62](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-62-320.jpg)
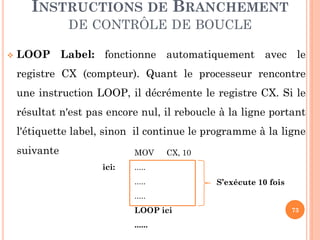
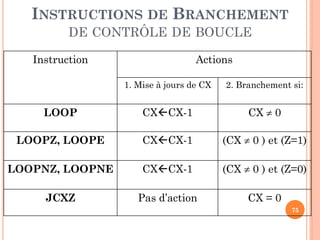
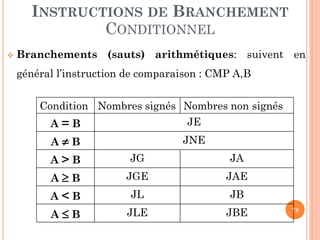
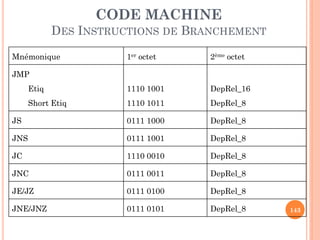
![INSTRUCTIONS DE BRANCHEMENT
DE CONTRÔLE DE BOUCLE
Exemple: Que fait ce programme?
MOV DX, 0
MOV CX, 5
ETIQ:
MOV BX, CX
MOV DL, [BX+1100]
LOOP ETIQ
74
Addition les 5 valeurs se trouvant à l’adresse 1101-1105](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-74-320.jpg)
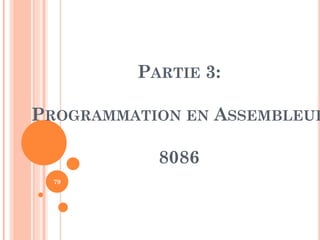
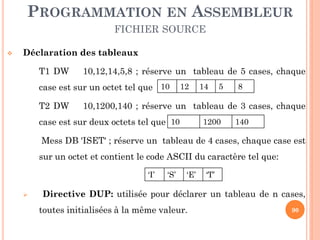
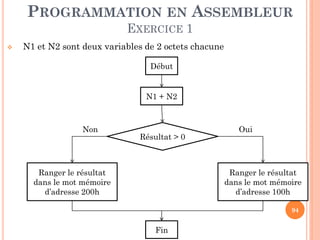
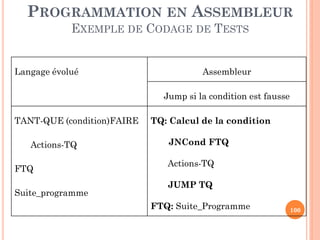
![PROGRAMMATION EN ASSEMBLEUR
EXERCICE 1 (1ÈRE SOLUTION)
PROGRAM Exemple1
MOV [200h], AX
Data1 SEGMENT
JMP Fin
N1 DW ?
Cond1: MOV [100h], AX
N2 DW ?
Fin:
Data1 ENDS
Code1 ENDS
Code1 SEGMENT
END Debut
ASSUME CS : Code1, DS: Data1
Debut : MOV AX, N1 ; AX N1
ADD AX, N2
CMP AX, 0
JG Cond1
;AX N1+ N2
95](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-95-320.jpg)
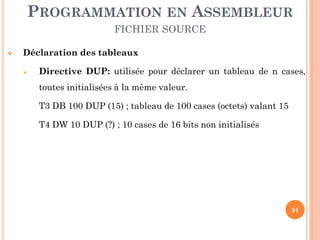
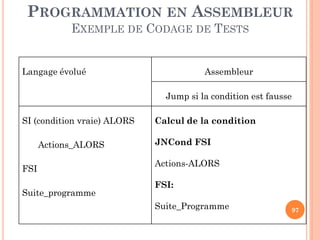
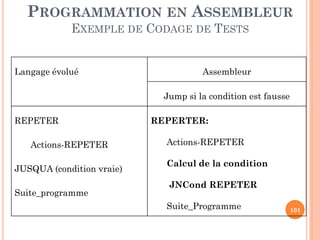
![PROGRAMMATION EN ASSEMBLEUR
EXERCICE 1 (2ÈME SOLUTION)
PROGRAM Exemple1
JE Cond2
Data1 SEGMENT
MOV [100h], AX
N1 DW ?
JMP Fin
N2 DW ?
Cond2: MOV [200h], AX
Data1 ENDS
Fin:
Code1 SEGMENT
Code1 ENDS
ASSUME CS : Code1, DS: Data1
END Debut
Debut : MOV AX, N1 ; AX N1
ADD AX, N2
CMP AX, 0
JS Cond1
;AX N1+ N2
96](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-96-320.jpg)
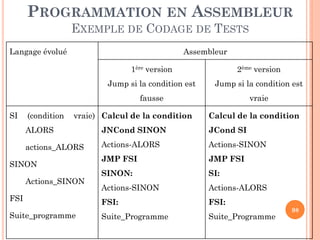
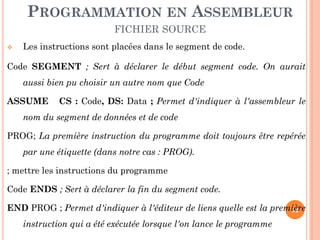
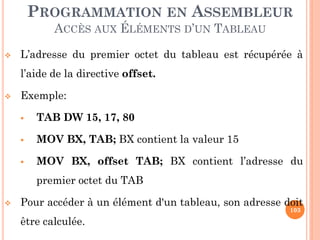
![PROGRAMMATION EN ASSEMBLEUR
EXERCICE 2
Écrire la suite d’instructions pour réaliser les étapes
suivantes :
1.
Copier le contenu de la case mémoire [1230h] dans
CX
2.
Comparer CX à 200
a.
si < incrémenter CX et recommencer au point 2
b.
si > décrémenter CX et recommencer au point 2
c.
si = copier CX dans AX et continuer le programme
102](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-102-320.jpg)
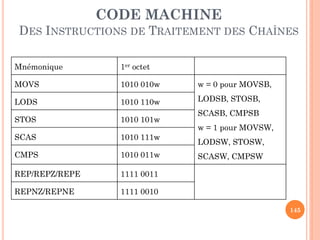
![PROGRAMMATION EN ASSEMBLEUR
TRAITEMENT DES CHAÎNES DE DONNÉES
LODSB/W
Chargement d’un élément de chaîne depuis la mémoire
dans un registre
STOSB/W
MOVSB/W
Transfert d’un élément entre deux chaînes
SCASB/W
Comparaison entre une valeur et un élément de chaîne
CMPSB/W
Écriture d’un élément de chaîne en mémoire
Comparaison entre deux éléments de chaîne
Un élément de la chaîne peut être soit un octet
105
(caractère) [B] ou un mot [W].](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-105-320.jpg)
![PROGRAMMATION EN ASSEMBLEUR
TRAITEMENT DES CHAÎNES DE DONNÉES
LODSB/W: Chargement d’un élément de chaîne depuis
la mémoire dans un registre
D=0
LODSB
MOV AL, [DS:SI] MOV AL, [DS:SI]
INC SI
LODSW
D=1
DEC SI
MOV AX, [DS:SI] MOV AX, [DS:SI]
ADD SI, 2
SUB SI, 2
107](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-107-320.jpg)
![PROGRAMMATION EN ASSEMBLEUR
TRAITEMENT DES CHAÎNES DE DONNÉES
STOSB/W: Écriture d’un élément de chaîne en mémoire
D=0
STOSB
MOV [ES:DI], AL MOV [ES:DI], AL
INC DI
STOSW
D=1
DEC DI
MOV [ES:DI], AX MOV [ES:DI], AX
ADD DI, 2
SUB DI, 2
108](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-108-320.jpg)
![PROGRAMMATION EN ASSEMBLEUR
TRAITEMENT DES CHAÎNES DE DONNÉES
MOVSB/W: transfert un élément de la chaîne source (DS:SI)
vers une élément de la chaîne destination (ES:DI).
D=0
MOV R, [DS:SI]
MOV [ES:DI], R
INC SI
DEC SI
INC DI
MOVSW
MOV R, [DS:SI]
MOV [ES:DI], R
MOVSB
D=1
DEC DI
MOV R, [DS:SI]
MOV R, [DS:SI]
MOV [ES:DI], R
MOV [ES:DI], R
ADD SI, 2
SUB SI, 2
ADD DI, 2
SUB DI, 2
109](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-109-320.jpg)
![PROGRAMMATION EN ASSEMBLEUR
TRAITEMENT DES CHAÎNES DE DONNÉES
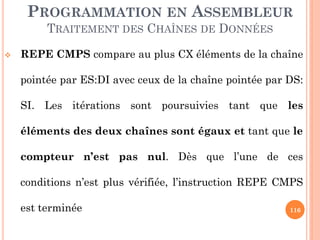
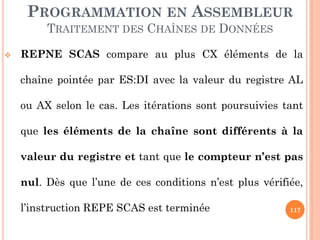
SCASB/W: Comparaison entre une valeur et un élément
de chaîne
D=0
SCASW
CMP [ES: DI], AL
CMP [ES: DI], AL
INC DI
SCASB
D=1
DEC DI
CMP [ES: DI], AX
CMP [ES: DI], AX
ADD DI, 2
SUB DI, 2
110](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-110-320.jpg)
![PROGRAMMATION EN ASSEMBLEUR
TRAITEMENT DES CHAÎNES DE DONNÉES
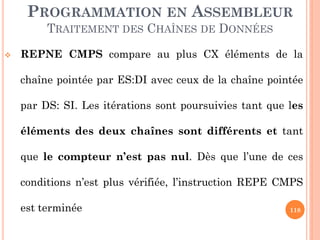
CMPSB/W: compare un élément de la chaîne source (DS:SI)
avec une élément de la chaîne destination (ES:DI).
D=0
MOV R, [DS:SI]
CMP [ES:DI], R
INC SI
DEC SI
INC DI
CMPSW
MOV R, [DS:SI]
CMP [ES:DI], R
CMPSB
D=1
DEC DI
MOV R, [DS:SI]
MOV R, [DS:SI]
CMP [ES:DI], R
CMP [ES:DI], R
ADD SI, 2
SUB SI, 2
ADD DI, 2
SUB DI, 2
111](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-111-320.jpg)
![PROGRAMMATION EN ASSEMBLEUR
TRAITEMENT DES CHAÎNES DE DONNÉES
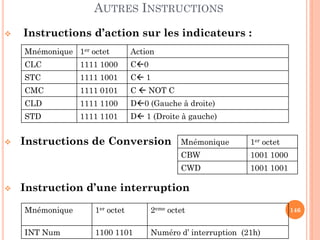
Les indicateurs de FLAGS ne sont pas modifiés par les
opérations (incrémentation et décrémentation) modifiant
la valeur des index (SI, DI) qui se font automatiquement
dans les instructions de traitement de chaines de
caractères. Donc, on ne peut pas utiliser les instructions
de branchement après ces instructions pour détecter la
fin des chaînes.
D=1
STOSB
JE
MOV [ES:DI], AL
DEC DI
JE
112](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-112-320.jpg)
![PROGRAMMATION EN ASSEMBLEUR
ACCÈS AUX ÉLÉMENTS D’UN TABLEAU
Exemple: Copier une chaîne lue dans une autre
Ch1 DB 15 DUP(13)
Ch2 DB 15 DUP(13)
.....
MOV AH, 0AH
LEA DX, Ch1
INT 21h
MOV CH, 0
MOV CL, [Ch1 + 1]
LEA SI, Ch1+2
LEA DI, Ch2+2
REP MOVSB
124](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-124-320.jpg)
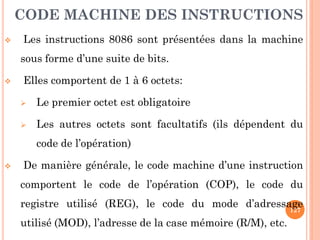
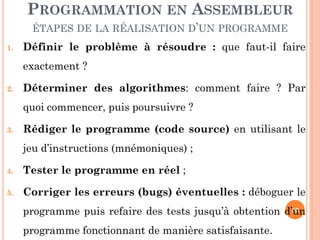
![CODE MACHINE DES INSTRUCTIONS
Bits
7
6
1er octet
2ème octet
3ème octet
5
4
3
2
COP
MOD
REG
[Optionnel]
1
0
D
W Le code d’opération
R/M
Le mode d’adressage
Les bits de poids faibles
ADR, DEP ou VAL
4ème octet
[Optionnel]
Les bits de poids forts de
ADR, DEP ou VAL
5ème octet
[Optionnel]
Les bits de poids faible de
VAL
6ème octet
[Optionnel]
128
Les bits de poids faible de
VAL](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-128-320.jpg)
![CODE MACHINE DES INSTRUCTIONS
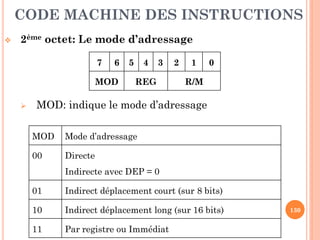
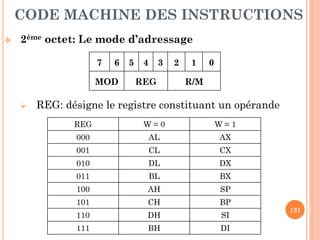
2ème octet: Le mode d’adressage
7
6
MOD
5
4
REG
3
2
1
0
R/M
R/M: précise l’adresse constituant l’instruction (direct
ou indirect) ou le code de registre destinataire (par
registre)
R/M
R/M
000
[BX+SI+DEP]
100
[SI+DEP]
001
[BX+DI+DEP]
101
[DI+DEP]
010
[BP+SI+DEP]
110
[BP+DEP]
Direct
011
[BP+DI+DEP]
111
[BX+DEP]
132](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-132-320.jpg)
![CODE MACHINE DES INSTRUCTIONS
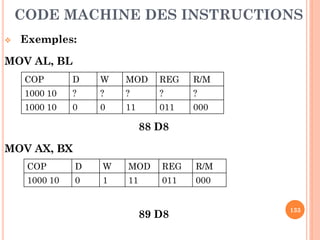
Exemples:
MOV DX, [123h]
COP
D
W
MOD
REG
R/M
ADR
1000 10
?
?
?
?
?
?
1000 10
1
1
00
010
110
2301
8B 16 23 01
MOV [123h], DX
COP
D
W
MOD
REG
R/M
ADR
1000 10
0
1
00
010
110
2301
89 16 23 01
134](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-134-320.jpg)
![CODE MACHINE DES INSTRUCTIONS
Exemples:
MOV [SI], BL
COP
D
W
MOD
REG
R/M
1000 10
?
?
?
?
?
1000 10
0
0
00
011
100
88 1C
MOV [SI + 14h], BL
COP
D
W
MOD
REG
R/M
ADR
1000 10
0
0
01
011
100
14
88 5C 14
135](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-135-320.jpg)
![CODE MACHINE DES INSTRUCTIONS
Exemples:
MOV [SI + 14h], BL
COP
D
W
MOD
REG
R/M
ADR
1000 10
0
0
01
011
100
14
88 5C 14
MOV [SI + 146h], BL
COP
D
W
MOD
REG
R/M
ADR
1000 10
0
0
10
011
100
4601
88 9C 46 01
136](https://image.slidesharecdn.com/chapitreiiiprocesseurintel80x86-140116154821-phpapp02/85/Chapitre-iii-processeur-intel-80x86-136-320.jpg)



































![Digital Signal Processor ( DSP ) [French]](https://cdn.slidesharecdn.com/ss_thumbnails/lesdsp-121002052639-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



















































