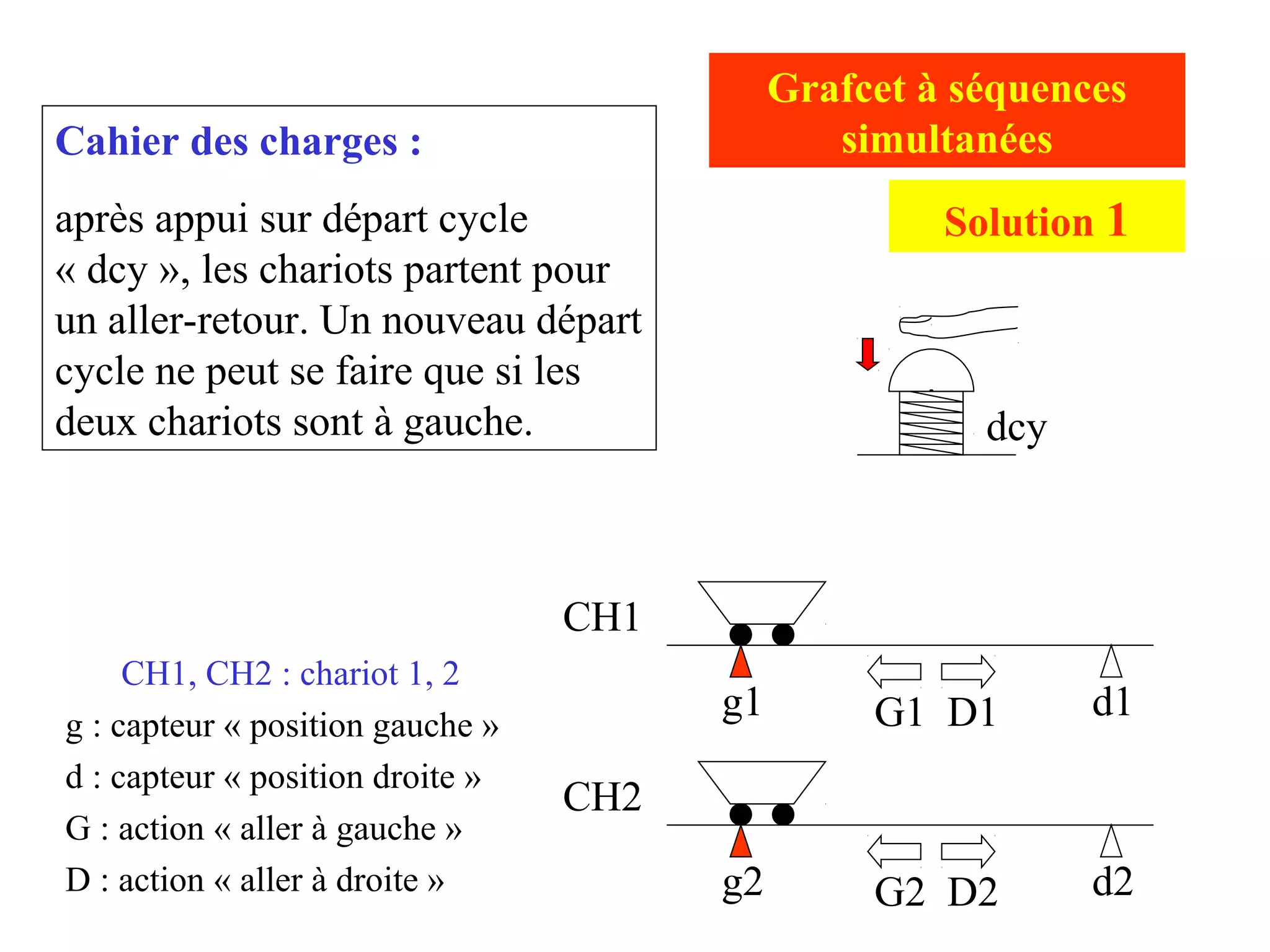
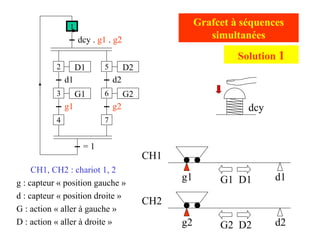
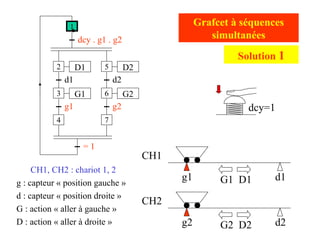
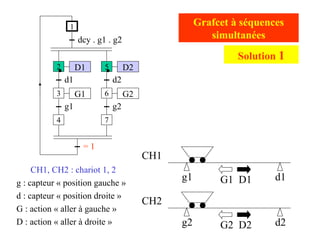
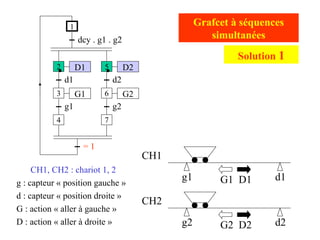
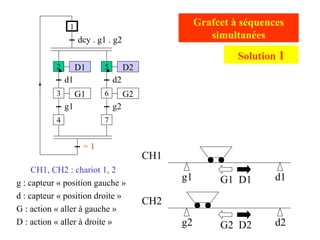
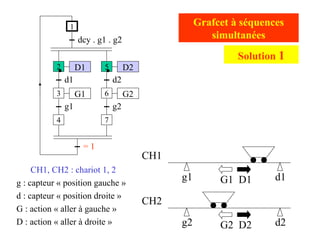
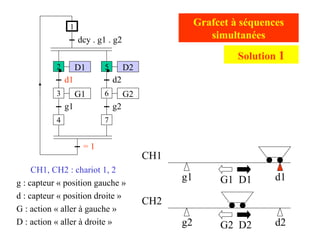
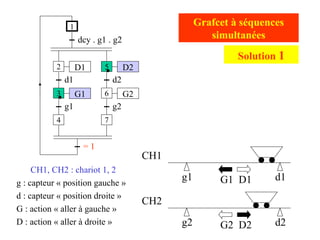
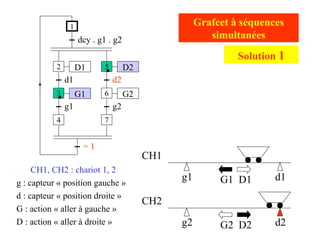
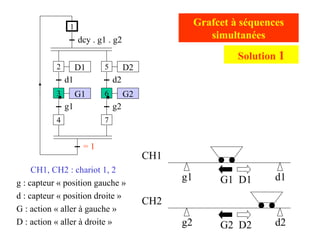
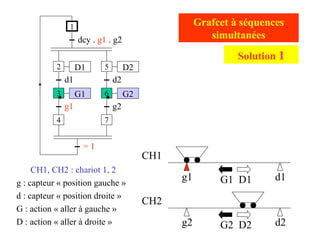
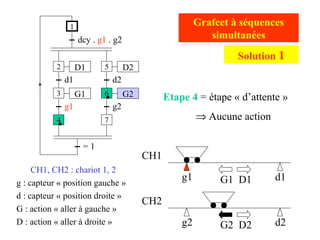
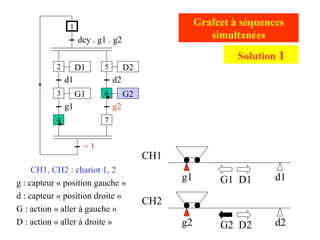
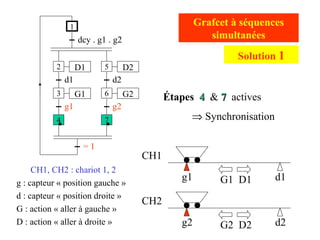
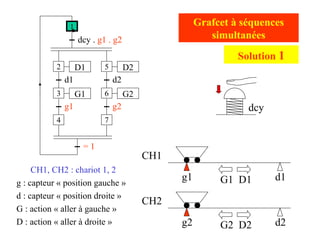
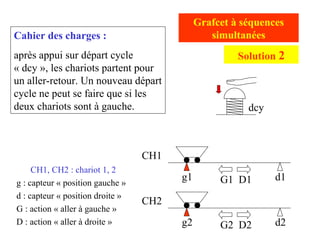
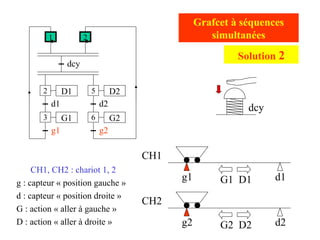
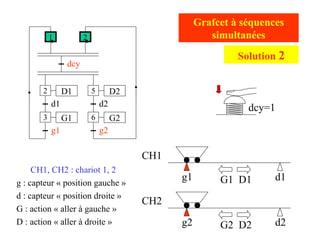
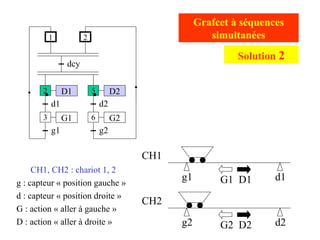
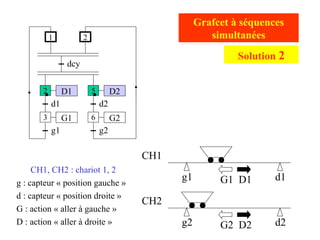
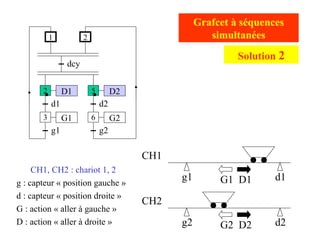
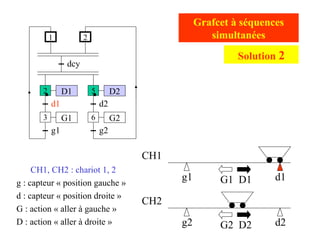
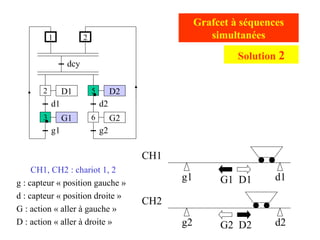
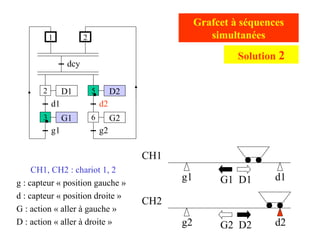
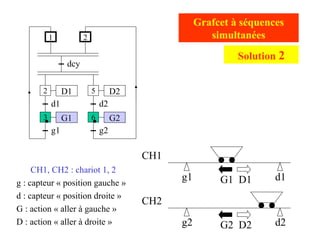
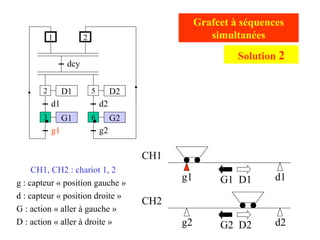
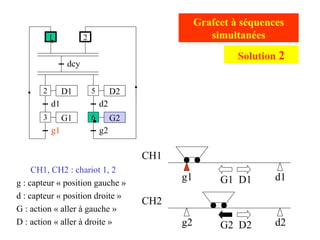
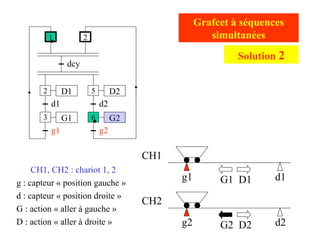
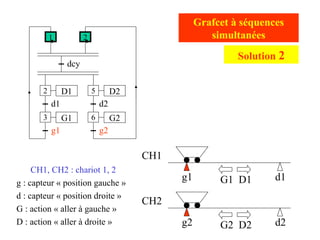
Le document présente un cahier des charges pour le contrôle de chariots automatisés (ch1 et ch2) utilisant des capteurs de position gauche (g) et droite (d). Il décrit plusieurs solutions de séquençage (grafcet) pour gérer les mouvements des chariots, notamment un aller-retour, avec des conditions de synchronisation pour le démarrage des cycles. Les solutions incluent des étapes d'attente et les actions à effectuer selon la position des chariots.