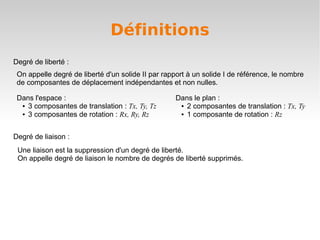
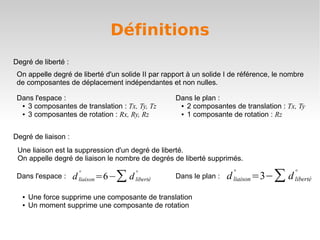
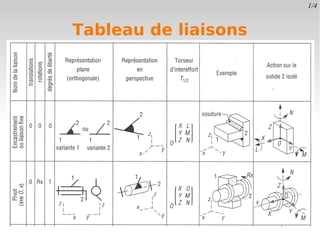
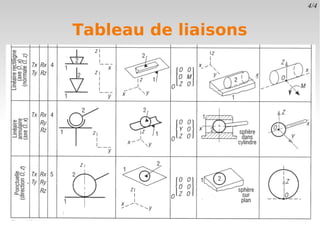
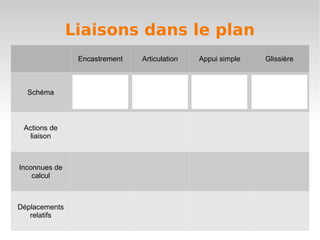
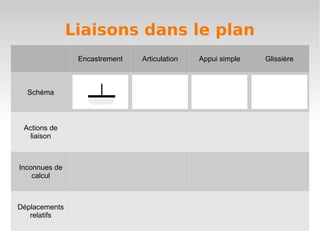
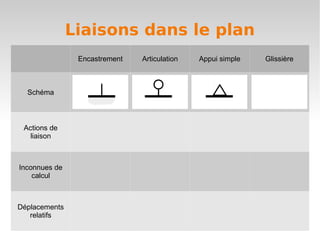
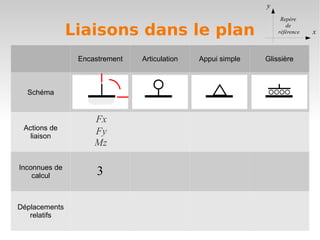
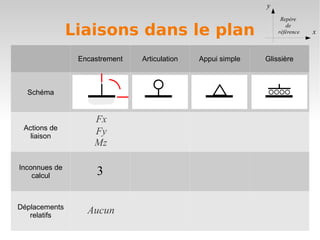
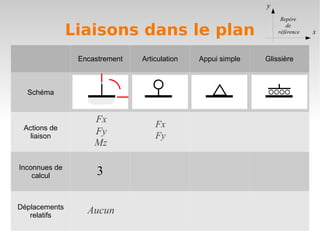
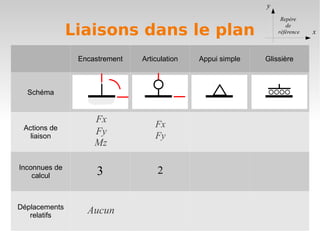
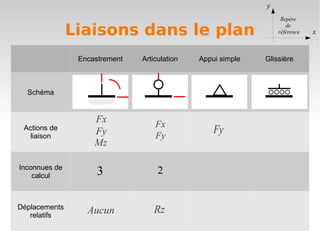
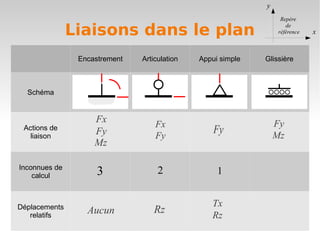
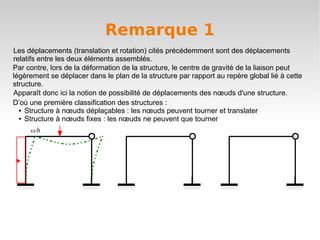
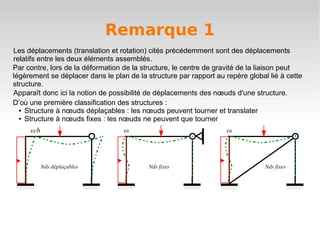
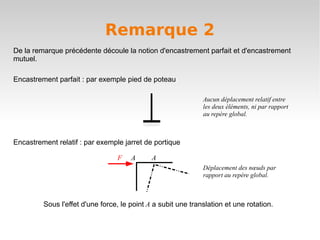
Le document définit le degré de liberté d'un solide par rapport à un solide de référence, en précisant les composantes de mouvement en translation et en rotation dans l'espace et le plan. Il explique également la notion de liaison, qui supprime un ou plusieurs degrés de liberté, et introduit la classification des structures selon la possibilité de déplacements de leurs nœuds. Enfin, il aborde des actions de liaison spécifiques et les conséquences sur les déplacements relatifs lors de la déformation des structures.