Téléchargé 370 fois

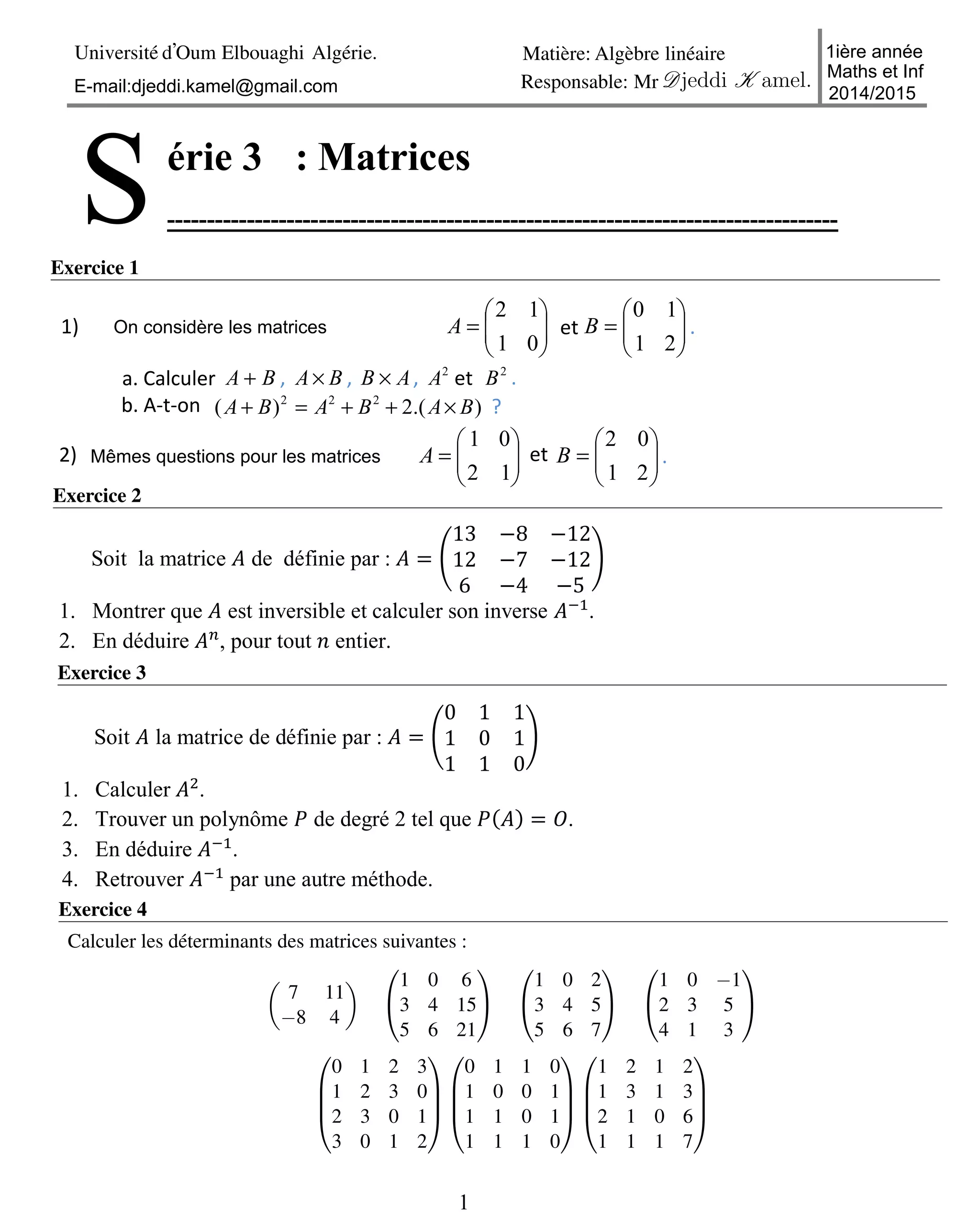










Le document présente une série d'exercices en algèbre linéaire pour la première année de mathématiques. Il aborde des sujets tels que le calcul de matrices, les déterminants, l'inversibilité des matrices et leurs propriétés. Des questions spécifiques sont posées, demandant des démonstrations et des calculs précis.






















































































