Télécharger en tant que PDF, PPTX
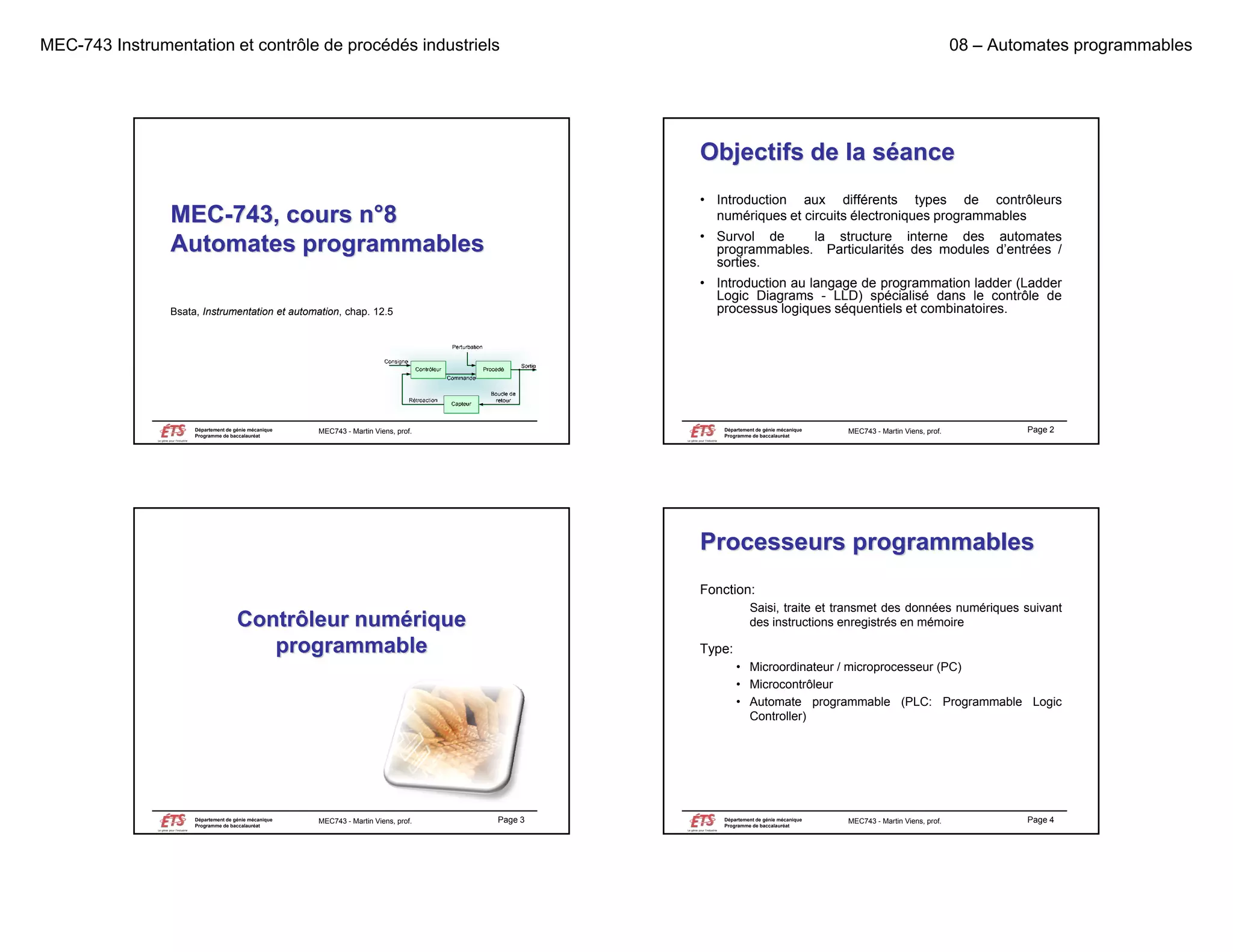
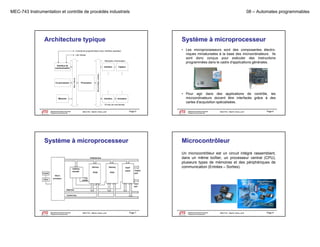





Le document présente une introduction aux automates programmables dans le contrôle de procédés industriels, incluant la structure interne, les types de contrôleurs numériques et le langage de programmation ladder. Il explique également les fonctions et l'architecture des automates, ainsi que les modules d'entrées/sorties et leur fonctionnement. Enfin, il aborde les types de mémoire utilisés dans ces systèmes et les différents types d'interfaces pour les capteurs et actionneurs.




















![Chap_1_Redresseurs.ppt [Mode de compatibilité].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/chap1redresseurs-231011183554-fea50d0b-thumbnail.jpg?width=640&height=640&fit=bounds)







































































