Ce document traite des concepts fondamentaux de la trigonométrie et de la géométrie dans un cadre académique. Il couvre notamment la mesure des angles en radians, le cercle trigonométrique, les relations entre angles orientés et vecteurs, ainsi que les méthodes de calcul dans ce contexte. Des exercices et des exemples sont fournis pour illustrer ces notions et aider à leur compréhension.


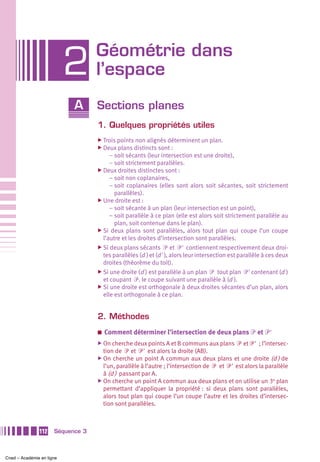
![a Repérage d’un point sur le cercle trigonométrique
+ En « enroulant » la droite des réels sur le cercle trigono-
métrique Ꮿ de centre O comme le suggère la figure ci-
π contre (dans le sens direct si x > 0 et dans le sens indirect
si x < 0 ), on associe à tout réel x un unique point M du
cercle.
x Exemple : Au réel 0, on associe le point I ; au réel π le
π π
point A, à le point J, à − le point C…
π 2 2
2
J a Définition
M
Si au nombre réel x, on associe le point M, on dit que x est
une mesure en radians de l’arc orienté IM ou de l’angle
I
A 0 orienté de vecteurs (OI ; OM).
O
C
a Ensemble des mesures d’un angle orienté
de vecteurs ; mesure principale
π ̈ Réciproquement, à un point M du cercle, est associée une
2 famille de réels.
π 3π
Au point J sont, par exemple, associés les réels , − …
2 2
Ces nombres réels sont définis « modulo 2π ». Cela
signifie que leurs différences sont des multiples entiers
π
de 2π (correspondant à des nombres de tours complets
du cercle dans le sens indirect ou direct).
Si x est un tel réel, on note :
(OI ; OM) = x + 2k π ( k ∈» ) ou (OI ; OM) = x (modulo 2π ).
̈ De même, si M et N sont deux points du cercle trigonométrique respec-
tivement associés aux réels x et y, les mesures en radians de l’angle
orienté (OM ; ON) sont les réels y − x + 2k π avec k ∈» .
̈ Parmi toutes les mesures d’un angle orienté ( OM ; ON) , une seule
appartient à l’intervalle ] − π ; π ] . On l’appelle la mesure principale de
l’angle ( OM ; ON) .
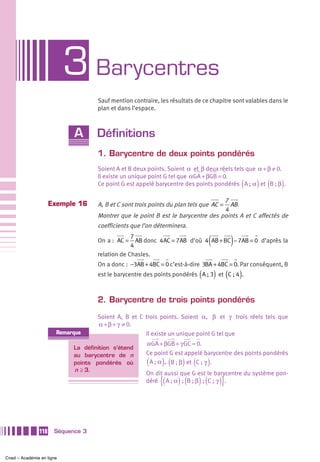
Exemple 1 On considère le cercle trigonométrique Ꮿ ci-contre et A, B, C trois points de Ꮿ .
Déterminer une mesure des angles de vecteurs : ( OI ; OB ),( OI ; OC ) ,
( OC ; OB ) .
Ꮿ +
Placer sur le cercle les points D et E tels que :
B
j
I −4 π 13 π
( OI ; OD ) = (2 π )et ( OI ; OE ) = (2 π ).
O 3 4
i Déterminer la mesure principale des angles
C
(OI ; OD ) et (OI ; OE ).
A
Séquence 3 103
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-3-320.jpg)
![π
On a ( OI ; OB ) = π (2π ) (angle plat); ( OI ; OC ) = − (2π ) (C est sur la bis-
4
⎛ π ⎞ 5π 3π
sectrice de l’angle droit AOI ) et ( OC ; OB ) = π − ⎜ − ⎟ = =− (2π ).
⎝ 4⎠ 4 4
4π π
On peut placer D en utilisant le fait que − = −π −
D et que OBD est par suite équilatéral. 3 3
Ꮿ
4π 2π 2π 2π
π j De plus − + 2π = et ∈ ] − π ; π ] donc
3 3 3 3 3
I
B est la mesure principale de (OI ; OD)
O i
13π 16π 3π 3π 3π 3π
C = − = 4π − = 2 × 2π − =− (2π )
E 4 4 4 4 4 4
A avec
3π 3π
− ∈ ] − π ; π ] donc − est la mesure principale
4 4
de (OI ; OE) . De plus E est sur la bissectrice de AOB .
3. Angle orienté de deux vecteurs quelconques
a Définition
N Soient u et v deux vecteurs non nuls tels que u = OM
v et v = ON .
Ꮿ B On considère les points A et B points d’intersection
u M
A respectifs des demi-droites [OM) et [ON) avec le cer-
j cle trigonométrique de centre O.
O i Les mesures en radians de l’angle orienté de vecteurs
(u ; v ) sont les mesures en radians de (OA ; OB ).
a Propriétés
̈ Angles et colinéarité Soient u et v deux vecteurs non nuls.
u et v sont colinéaires de même sens si et seulement
si (u ; v ) = 0 (modulo 2π ).
u et v sont colinéaires de sens contraires si et
seulement si (u ; v ) = π (modulo 2π ).
̈ Relation de Chasles Pour tous vecteurs u , v , w non nuls, on a :
(u ; v ) + (v ; w ) = (u ; w ) (modulo 2π ).
104 Séquence 3
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-4-320.jpg)
![̈ Conséquences Pour tous vecteurs u , v non nuls, on a (modulo 2π) :
v ᕡ (v ; u ) = −(u ; v )
π
ᕢ ( −u ; −v ) = (u ; v )
–u
u
ᕣ ( −u ; v ) = (u ; v ) + π et (u ; −v ) = (u ; v ) + π
–v
4. Les méthodes
a Comment déterminer la mesure principale d’un angle
orienté
Pour calculer la mesure principale d’un angle orienté de mesure
(en radians) x, on décompose x sous la forme d’une somme de type
y + k × 2π avec y ∈] − π ; π ] et k ∈» alors y est la mesure principale
associée à x. On peut aussi si x est « grand » estimer « le nombre de
tours complets du cercle contenus dans cette mesure » puis ajouter ou
soustraire à x la mesure en radians de ce nombre de tours qui est donc
un multiple de 2π , afin d’obtenir un réel de ] − π ; π ].
Exemple 2 Déterminer la mesure principale d’un angle orienté dont une mesure est
431π
.
6 431π
On calcule 6 (pour estimer le nombre de tours complets) :
2π
431π
6 = 431 36 (on arrondit à l’entier le plus proche).
2π 12
431π 431π − 432π π π π
Puis − 36 × 2π = = − avec − ∈ ] − π ; π ] donc −
6 6 6 6 6
est la mesure principale demandée.
a Comment utiliser les règles opératoires sur les
angles orientés
On peut utiliser les propriétés du 3. pour montrer le parallélisme de deux
droites, l’alignement de trois points ou l’orthogonalité de deux droites.
Si A, B, C, D sont 4 points deux à deux distincts, on a en particulier :
( )
(AB) // (CD) ⇔ AB ; CD = 0 ( modulo π )
( )
A, B, C alignés ⇔ AB ; AC = 0 ( modulo π ).
Exemple 3 OnconsidèrelespointsA,B,C,DetEtelsque ( AB ; AE ),( AB ; AD ) et ( AD ; AC )
2 π 3π 5π
ont pour mesures respectives − , et − .
3 4 12
Démontrer que les points A, C et E sont alignés.
Séquence 3 105
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-5-320.jpg)



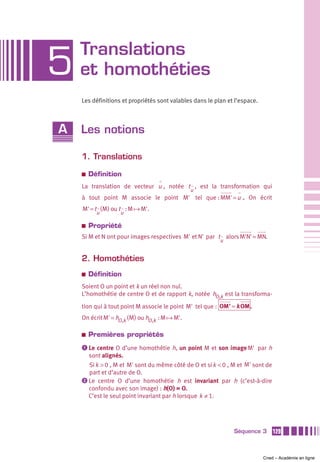
![a Comment utiliser les valeurs remarquables pour
construire le point associé à une mesure
Pour placer le point du cercle trigonométrique associé à une mesure x en
radians, on peut utiliser cos x ou sin x qui nous donnent l’abscisse ou
l’ordonnée du point M.
5π
Exemple 6 Construire (précisément) le point M associé à la mesure en radians .
6
⎛ 5π ⎞ 1
On utilise le fait que sin⎜ ⎟ = (voir ci-dessus avec les angles asso-
M5π ⎝ 6⎠ 2
6 1/2 i ⎛ 5π ⎞
ciés) et que cos ⎜ ⎟ < 0 donc M est le point du cercle trigonométrique
⎝ 6⎠
O 1
i tel que : x M < 0 et y M = .
2
a Comment résoudre des équations trigonométriques
M(a) ̈ Pour résoudre une équation trigonométrique du type cos x = k (avec
k ∈[ −1 ; 1] sinon l’équation n’a pas de solution), on cherche un réel a
cos a
O
tel que cos a = k puis on utilise :
⎧ x = a + 2k π
M’(–a) ⎪
cos x = cos a ⇔ ⎨ ou avec k ∈» .
⎪ x = −a + 2k π
⎩
̈ Pour résoudre une équation trigonométrique du type sin x = k (avec
M’(π–a) M(a) de même, k ∈[ −1 ; 1]), on cherche un réel a tel que sin a = k puis on
sin a
utilise :
O
⎧ x = a + 2k π
⎪
sin x = sin a ⇔ ⎨ ou avec k ∈».
⎪ x = π − a + 2k π
⎩
̈ Il faut aussi tenir compte de l’ensemble dans lequel on résout l’équa-
tion et bien utiliser le cercle trigonométrique.
3
Exemple 7 Résoudre l’équation cosx = − dans » puis dans ] − π ; π ] .
2
⎛ 5π ⎞ 3 ⎛ π⎞
On a cos ⎜ ⎟ = − (éventuellement passer par cos ⎜ ⎟ et s’aider du
5π ⎝ 6⎠ 2 ⎝ 6⎠
6 j cercle pour trouver cela). ⎧ 5π
i ⎪x= + 2k π
⎪ 6
3 3 ⎛ 5π ⎞
2 5π Donc cos x = − ⇔ cos x = cos ⎜ ⎟ ⇔ ⎨ou k ∈».
6 2 ⎝ 6⎠ ⎪
⎪ x = − 5π + 2k π
⎪
⎩ 6
D’où l’ensemble des solutions de l’équation dans » est :
⎧ 5π ⎫
= ⎨ ± + 2k π ; k ∈» ⎬ (il y en a une infinité).
⎩ 6 ⎭
⎧ 5π ⎫
Dans ] − π ; π ] , = ⎨ ± ⎬ (il y a exactement deux solutions).
⎩ 6⎭
Séquence 3 109
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-9-320.jpg)



![Exemple 11 ABCDEFGH est un cube. I, J et K appartiennent respectivement aux arêtes
[GH], [GC] et [AD] comme sur la figure ci-dessous. Déterminer la section
du cube par le plan (IJK).
P
Les droites (IJ) et (CD) sont coplanaires sécantes
I G (incluses dans (CDG)). Notons M leur point d’inter-
( )
Q
H section. M ∈ IJK .
E Les droites (MK) et (BC) sont coplanaires sécantes (incluses
( )
F
J
dans (ABC)). Notons N leur point d’intersection. N ∈ IJK .
Les droites (IJ) et (DH) sont coplanaires sécantes (incluses
D C
( )
dans (DHG)). Notons P leur point d’intersection. P ∈ IJK .
Les droites (PK) et (EH) sont coplanaires sécantes (incluses
( )
M
K N dans (EHD)). Notons Q leur point d’intersection. Q ∈ IJK .
A B La section du cube par le plan (IJK) est le pentagone IJNKQ.
B Repérage
1. Vecteurs coplanaires
a Définition
Soient u , v et w trois vecteurs et A un point de l’es-
B
u pace.
A C Soient B, C et D les points tels que AB = u , AC = v et
w v AD = w .
D
On dit que les vecteurs u , v et w sont coplanaires
lorsque les points A, B, C et D sont coplanaires c’est-
à-dire qu’ils appartiennent à un même plan.
Remarques
̈ Les opérations sur les vecteurs du plan s’étendent à
l’espace (addition, relation de Chasles, multiplication
d’un vecteur par un réel, vecteurs colinéaires).
̈ Lorsque u et v ne sont pas colinéaires, on a :
u, v et w sont coplanaires ⇔ il existe des réels a et
b tels que w = au + bv .
2. Repérage cartésien dans l’espace
̈ Une base de l’ensemble des vecteurs de l’espace est un triplet (i , j ,k )
de vecteurs non coplanaires de l’espace.
̈ Un ( )
repère de l’espace est un quadruplet O ; i , j ,k où O est un point,
( )
origine du repère, et i , j ,k une base.
114 Séquence 3
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-14-320.jpg)
![⎛ x⎞
̈ u a pour coordonnées ⎜y ⎟
⎜ ⎟
⎜z⎟
dans la base (i , j ,k ) signifie
u = xi + y j + zk . ⎝ ⎠
̈ ( )
M a pour coordonnées x ; y ; z dans le repère O ; i , j ,k ( ) signifie
OM = xi + y j + zk .
⎛ x⎞ ⎛ x '⎞ ⎛ x + x '⎞ ⎛ λx ⎞
̈ Si u ⎜ y ⎟ et v ⎜ y '⎟ alors u + v ⎜ y + y ' ⎟ et λu ⎜ λy ⎟ , λ étant un réel.
⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎜z⎟
⎝ ⎠ ⎜ z '⎟
⎝ ⎠ ⎜ z + z '⎟
⎝ ⎠ ⎜ λz ⎟
⎝ ⎠
⎛ xB − x A ⎞
⎜ ⎟
̈ Le vecteur AB a pour coordonnées ⎜ y − y ⎟ .
B A
⎜ ⎟
⎝ zB − z A ⎠
̈ Le milieu du segment [AB] a pour coordonnées
⎛ x A + x B y A + y B z A + zB ⎞
⎜ ; ; ⎟
⎝ 2 2 2 ⎠
̈ Deux vecteurs sont égaux si, et seulement si, leurs coordonnées sont
égales.
3. Distance entre deux points en repère ortho-
normal
Dans un repère orthonormé,
AB = AB = ( xB − x A )2 + (yB − y A )2 + (zB − z A )2
⎛ x⎞
et si u ⎜ y ⎟ , u = x 2 + y 2 + z 2 .
⎜ ⎟
⎜z⎟
⎝ ⎠
4. Équations de quelques objets de l’espace
̈ Équations des plans parallèles aux plans de coordonnées ( λ ∈» )
Plan (O ; i , j ) (O ; i ,k ) (O ; j ,k )
Équation z =0 y =0 x =0
Équation d’un plan parallèle z=λ y =λ x =λ
̈ Équation d’une sphère centrée à l’origine.
Dans un repère orthonormé (O ; i , j ,k ), la sphère de cen-
Séquence 3 115
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-15-320.jpg)




![C Trois utilisations des barycentres
1. Montrer l’alignement de points
Pour montrer que trois points sont alignés, on peut interpréter un des
points comme barycentre des deux autres points affectés de coeffi-
cients.
Exemple 18 On considère un triangle ABC ; I est le milieu du segment ⎡BC ⎤ , J est le
⎣ ⎦
1
milieu du segment ⎡ AI ⎤ et K est le point défini par AK = AC . Montrer
⎣ ⎦ 3
que les points B, J et K sont alignés.
I est le milieu de ⎡BC ⎤ d’où I est l’iso-
⎣ ⎦
A
barycentre de B et C donc le barycentre
( ) (
des points pondérés B ; 1 et C ; 1 . )
K J est le milieu de ⎡ AI⎤ d’où J est l’iso-
⎣ ⎦
barycentre de A et I donc le barycentre
J ( ) ( )
des points pondérés A ; 2 et I ; 2 .
D’après l’associativité du barycentre, J
est alors le barycentre des points pon-
( ) ( ) (
dérés A ; 2 , B ; 1 et C ; 1 . )
C
1
B I De plus, on a:AK = AC donc
3
3AK = AC d’où 3AK = AK + KC d’après
la relation de Chasles et donc : 2KA + KC = 0. Par conséquent, K est le
( ) ( )
barycentre des points pondérés A ; 2 et C ; 1 .
( ) ( ) ( )
J barycentre des points pondérés A ; 2 , B ; 1 et C ; 1 . est alors le
( ) ( )
barycentre des points pondérés K ; 3 et B ; 1 d’après le théorème du
barycentre partiel.
Les points B, J et K sont donc alignés.
2. Montrer que des droites sont concourantes
On montre que toutes ces droites passent par le barycentre d’un même
système pondéré ; ce barycentre est alors le point de concours des droi-
tes considérées.
Exemple 19 ABCD est un tétraèdre. Les points I, J, K, L, M et N sont les milieux res-
pectifs des arêtes [AB], [AC], [AD], [BC], [BD] et [CD]. Les points A', B', C'
et D' sont les centres de gravité respectifs des triangles BCD, ACD, ABD
et ABC.
Montrer que les droites (IN), (JM), (KL), (AA'), (BB'), (CC') et (DD') sont
concourantes.
Séquence 3 121
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-21-320.jpg)







![a Propriété (Relation fondamentale)
Si M et N ont pour images respectives M' et N' par l’homothétie de cen-
tre O et de rapport k alors M'N' = k MN.
a Application
Soit h l’homothétie de centre O qui transforme A en A'.
Alors B ' = h (B) est l’intersection de (OB ) et de la droite parallèle à (AB )
passant par A'.
B Propriétés
Dans ce paragraphe, f désigne une translation ou une homothétie
1. Images de figures simples par f
Remarque ᕡ L’image d’une droite (d ) passant par un point A est
la droite (d ') parallèle à (d ) et passant par
Les formes des figu- A ' = f ( A ).
res sont donc conser- ᕢ L’image d’un segment [ AB ] est le segment [ A 'B']
vées mais par une où A ' = f ( A ) et B' = f (B ).
homothétie, elles
ᕣ L’image du cercle de centre Ω et de rayon R est le
sont agrandies ou
réduites.
cercle de centre Ω' = f ( Ω ) et de rayon :
R si f est une translation,
k × R si f est une homothétie de rapport k.
2. Éléments conservés
ᕡ Les translations et les homothéties conservent les directions, l’aligne-
ment, les mesures des angles orientés.
ᕢ Les translations et les homothéties conservent les milieux des seg-
ments et les barycentres des points pondérés :
Si G est le barycentre des points pondérés ( A ; α ) et (B ; β )
avec α+β ≠ 0 alors G ' = f (G ) est le barycentre des points pondérés
( A ' ; α ) et (B' ; β ) avec A ' = f ( A ) et B' = f (B ).
3. Action sur les longueurs, les aires et les volumes
ᕡ Une translation conserve les longueurs, les aires et les volumes.
ᕢ Une homothétie de rapport k multiplie les longueurs par k , les aires
3
par k 2 et les volumes par k .
130 Séquence 3
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-30-320.jpg)

![A On sait que l’image de E par h est l’intersection de (AE)
et de la parallèle à la droite (DE) passant par B qui est
E D
en fait la droite (BC). Donc h(E ) = ( AE ) ∩ (BC ) = C.
L’image du carré DEFG par h est donc le carré BCHI
(conservation des formes et h(D ) = B, h(E ) = C) et
C B
F G l’image de F par h est par suite H et celle de G par h
est I. Les points A, G, I sont donc alignés de même
que les points A, F, H (le centre, un point et son image
par h sont alignés).
HRemarques I
̈ On peut utiliser cet exemple pour résoudre un problème de construction
qui est de construire un carré inscrit dans un triangle ABC donné. On
commence par construire le carré BCHI extérieur au triangle ABC puis
les points G et F s’obtiennent comme points d’intersection respectifs de
(AI),(BC) (pour G) et (AH), (BC) (pour F). Les points D et E ne sont alors plus
difficiles à construire pour terminer le carré FGDE inscrit dans le triangle.
̈ On peut aussi sur le même procédé montrer que des droites sont concou-
rantes en utilisant une homothétie dont le centre est le point de concours
supposé.
3. Recherche d’un lieu géométrique
Exemple 31 On considère un tétraèdre ABCD ; I est le milieu de [CD], M est un point
de [AB]. On note N le milieu de [IM] et on cherche le lieu géométrique de
N lorsque M décrit [AB] (c’est-à-dire l’ensemble des positions prises par
N lorsque M décrit [AB]).
A On cherche à exprimer N comme image de M (qui
décrit [AB]) par une certaine transformation. Le lieu
de N sera alors l’image de [AB] par cette transforma-
1
M tion. N étant le milieu de [IM], on a toujours IN = IM
J 2
N est donc l’image de M par l’homothétie h de centre
1
N I et de rapport .
B D 2
Le lieu géométrique de N est donc l’image du segment
K
I
[AB] par h. On pose J = h(A) et K = h(B) (c’est-à-dire J
milieu de [AI] et K milieu de [BI]). Le lieu géométrique
C
de N est donc le segment [JK].
V Voir exercices 29 à 33
132 Séquence 3
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-32-320.jpg)
![6 Exercices d’application
Exercice 1 Déterminer les mesures principales associées aux mesures d’angles
17π 55π −2008π
orientés suivantes : − ; ; .
3 12 11
Exercice 2 On considère un hexagone régulier ABCDEF de sens direct de centre O.
Déterminer les mesures principales des angles orientés suivants :
(OA ; OC) ; (OA ; OE) ; (OA ; EO) ; (CO ; OA) ; (AB ; DE) ; (AF ; CF ) ; (AC ; FD).
D
Exercice 3 Simplifier la somme suivante :
⎛ π⎞ ⎛ 9π ⎞ ⎛ 15π ⎞ ⎛ 7π ⎞
S = sin⎜ ⎟ − sin⎜ ⎟ + sin⎜ ⎟ − sin⎜ 8 ⎟ .
⎝ 8⎠ ⎝ 8⎠ ⎝ 8 ⎠ ⎝ ⎠
7π π
Exercice 4 Déterminer les lignes trigonométriques de à partir de celles de et
12 3
π 5π
. En déduire celles de .
4 12
Exercice 5 Résoudre les équations et inéquations trigonométriques suivantes dans
les intervalles considérés :
3 3
(E 1 ) sin x = − dans [0 ; 2π ] (I1 ) sin x > − dans [0 ; 2π ]
2 2
2
(E 2 ) cos(2x ) = dans ».
2
Exercice 6 ᕡ Calculer les coordonnées cartésiennes des points définis par leurs
coordonnées polaires :
⎛ 1 2π ⎞ ⎛ 5π ⎞
A ⎜ ; ⎟ ; B ⎜ 3 ; ⎟ . Construire ces points dans un repère orthonormé.
⎝2 3 ⎠ ⎝ 6⎠
ᕢ Calculer les coordonnées polaires des points définis par leurs coor-
données cartésiennes : C ( −5 ; 0 ) ; D( 3 ; −4 ) ; E ( −2 3 ; −2).
Exercice 7 On considère un tétraèdre ABCD, I est un point de la face ABC et J un
point de la face ACD, la droite (IJ) n’étant parallèle ni au plan (BCD) ni au
plan (ABD). Construire l’intersection de la droite (IJ) avec le plan (BCD),
puis l’intersection de (IJ) avec le plan (ABD).
Exercice 8 On considère un cube ABCDEFGH ; I, J et K sont trois points appartenant
respectivement aux arêtes [BC], [CD] et [EH].
Construire la section du cube par le plan (IJK).
Séquence 3 133
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-33-320.jpg)

![Exercice 19 On considère un cube ABCDEFGH.
Montrer que le point C est le barycentre du système
{( ) ( ) ( ) ( )}
B ; 1 ; D ; 1 ; G ; 1 ; E ; −1 .
En déduire que le centre de gravité du triangle BDG est au tiers de la
diagonale [CE] en partant de C.
(
Pour les exercices 20 à 23, le plan est muni d’un repère orthonormé O ; i , j . )
Exercice 20 ( )
Déterminer une équation du cercle Ꮿ de centre Ω −3 ; 2 et de rayon 5.
Exercice 21 Déterminer une équation du cercle Ꮿ de diamètre [AB] avec A 4 ; −5 ( )
(
et B −2 ; 1 . )
Exercice 22 Déterminer une équation de la médiatrice (d) du segment [AB] avec
( ) (
A −4 ; 2 et B 2 ; 5 .)
⎛ 6⎞ ⎛3 ⎞ ⎛ −1 ⎞ ⎛ −2⎞
Exercice 23 On considère les vecteurs u ⎜ ⎟ ; v ⎜ ⎟ ; w ⎜ 1,5⎟ et t ⎜ −3⎟ .
⎝ −4⎠ ⎝ 4,5⎠ ⎝ ⎠ ⎝ ⎠
Etudier l’orthogonalité et la colinéarité de ces 4 vecteurs pris deux à
deux.
Exercice 24 A, B, C et D sont 4 points distincts du plans tels que les triangles ABC et
ABD sont équilatéraux de côté a cm.
Calculer les produits scalaires AC ⋅ AD , CA ⋅ CD et AB ⋅ CD.
Exercice 25 ABCD est un rectangle tel que AB = 5 et AD = 4. I est le point de [AB] tel
que AI = 2.
( )( )
ᕡ Développer le produit scalaire IA + AD ⋅ IB + BC . En déduire la valeur
de ID ⋅ IC.
ᕢ Calculer ID et IC. En déduire l’égalité cos CID =
5
.
5
Exercice 26 On considère un triangle ABC tel que AB = 6, AC = 8 et BC = 11.
AB2 + AC2 − BC2
Montrer que AB ⋅ AC = puis calculer AB ⋅ AC.
2
Exercice 27 On considère un parallélogramme ABCD tel que AB = 5, AD = 4 et AC = 6.
Calculer BD.
Exercice 28 On considère deux points A et B tels que AB = 4.
Déterminer l’ensemble Ᏹ des points M du plan tels que
2 2
MA − MB = 12.
Séquence 3 135
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-35-320.jpg)
![Exercice 29 On considère un parallélogramme ABCD de centre O et le point G, centre
de gravité du triangle ABC.
ᕡ Déterminer le rapport de l’homothétie de centre D qui transforme B
en G.
ᕢ Construire les images de A et de C par cette homothétie.
Exercice 30 On considère un cube ABCDEFGH et les points I, J et K centres respectifs
des faces AEHD, ABFE et ABCD.
On note R le centre de gravité du triangle CFH et S celui de IJK.
Montrer que les points A, R, S sont alignés.
Exercice 31 On considère un cercle Ꮿ centre O et une corde [AB] de ce cercle. Soient
M un point de Ꮿ autre que A et B, et G le centre de gravité du triangle
MAB.
Déterminer le lieu géométrique du point G lorsque M décrit le cercle Ꮿ
privé de A et B.
Exercice 32 Soient A, B deux points fixes distincts et (d) une droite passant par A.
A tout point M de (d), on associe le point N tel que ABMN soit un paral-
lélogramme.
Déterminer le lieu géométrique de N lorsque M décrit (d).
Exercice 33 D et E sont 2 points du plan et Ꮿ , Ꮿ ' sont 2 cercles de centres respectifs
O et O'.
Construire F sur le cercle Ꮿ et G sur le cercle Ꮿ ' tels que le quadrilatère
DEGF soit un parallélogramme.
Dénombrer toutes les solutions et justifier la construction.
E
D
Ꮿ’
Ꮿ
O O’
136 Séquence 3
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-36-320.jpg)
![7 Corrigés des exercices
17π 18π π π π π
Exercice 1 ̈ On a − =− + = −6π + = − 3 × 2π . Comme ∈] − π ; π ],
3 3 3 3 3 3
17π π
on en déduit que la mesure principale associée à − est .
3 3
55π 48π 7π 7π 7π 7π
̈ On a = + = 4π + = + 2 × 2π . Comme ∈] − π ; π ],
12 12 12 12 12 12
55π 7π
on en déduit que la mesure principale associée à est .
12 12
2008π
−
2008π 11 :
̈ − étant une « grande » mesure, on calcule
11 2π
2008π
−
11 = − 2008 −91.
2π 22
2008π −2008π + 2002π 6π 6π
Puis − + 91 × 2π = =− avec − ∈ ] − π ; π ]
11 11 11 11
6π −2008π
donc − est la mesure principale associée à .
11 11
Exercice 2 Les angles au centre de l’hexagone (comme AOB, BOC,...) mesurent 60°
π
soit radians.
3
D’où les mesures principales suivantes :
A + ( ) ( )(
OA ; OC = OA ; OB + OB ; OC =
2π
3
)
B π
π
3
F ( ) ( )( )
OA ; OE = OA , OF + OF ; OE = −
2π
3
( ) ( ) ( )
3 π
OA ; EO = OA ; −OE = OA ; OE + π =
3
O ( ) ( ) π
CO ; OA = OF ; OA = car CO = OF
3
C E ( AB ; DE) = π car AB = −DE π
D
( AF ; CF ) = (CD ; CF ) = (CD ; CO) = 3 car AF = CD et
(
CO, CF sont colinéaires de même sens ; AC ; FD = 0 )
car (AC) // (DF) et AC,FD sont de même sens (propriété de l’hexagone).
Séquence 3 137
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-37-320.jpg)
![⎛ π⎞ ⎛ 9π ⎞ ⎛ 15π ⎞ ⎛ 7π ⎞
Exercice 3 S = sin⎜ ⎟ − sin⎜ ⎟ + sin⎜
⎝ 8⎠ ⎝ 8⎠ ⎝ 8 ⎠ ⎟ − sin⎜ 8 ⎟
⎝ ⎠
⎛ π⎞ ⎛ π⎞ ⎛ π⎞ ⎛ π⎞
= sin⎜ ⎟ − sin⎜ π + ⎟ + sin⎜ 2π − ⎟ − sin⎜ π − ⎟
⎝ 8⎠ ⎝ 8⎠ ⎝ 8⎠ ⎝ 8⎠
⎛ π⎞ ⎛ π⎞ ⎛ π⎞ ⎛ π⎞
donc S = sin⎜ ⎟ + sin⎜ ⎟ + sin⎜ − ⎟ − sin⎜ ⎟
⎝ 8⎠ ⎝ 8⎠ ⎝ 8⎠ ⎝ 8⎠
( ) ( )
car sin π + x = − sin x , sin(2π + x ) = sin( x ) et sin( π − x ) = sin( x ).
⎛ π⎞ ⎛ π⎞
D’où, S = sin⎜ ⎟ − sin⎜ ⎟ = 0 car sin( − x ) = − sin( x ).
⎝ 8⎠ ⎝ 8⎠
7π 4π 3π π π
Exercice 4 On a = + = + donc en utilisant les formules d’addition,
12 12 12 3 4
7π ⎛ π π⎞ π π π π
cos = cos ⎜ + ⎟ = cos cos − sin sin
12 ⎝ 3 4⎠ 3 4 3 4
1 2 3 2 2− 6
= × − × =
2 2 2 2 4
7π ⎛ π π⎞ π π π π
et sin = sin⎜ + ⎟ = sin cos + sin cos
12 ⎝ 3 4⎠ 3 4 4 3
3 2 2 1 6+ 2
= × + × = .
2 2 2 2 4
⎛ 5π ⎞ ⎛ 7π ⎞ ⎛ 7π ⎞
Puis cos ⎜ ⎟ = cos ⎜ π − ⎟ = − cos ⎜ ⎟ car cos( π − x ) = − cos x soit
⎝ 12 ⎠ ⎝ 12 ⎠ ⎝ 12 ⎠
⎛ 5π ⎞ 6− 2
cos ⎜ ⎟ =
⎝ 12 ⎠ 4
⎛ 5π ⎞ ⎛ 7π ⎞ ⎛ 7π ⎞
et sin⎜ ⎟ = sin⎜ π − ⎟ = sin⎜ ⎟ car sin( π − x ) = sin x soit
⎝ 12 ⎠ ⎝ 12 ⎠ ⎝ 12 ⎠
⎛ 5π ⎞ 6+ 2
sin⎜ ⎟ = .
⎝ 12 ⎠ 4
3
Exercice 5 (E 1 ) sin x = − dans [0 ; 2π ] :
2
⎛ π⎞ 3 ⎛ π⎞ 1
C On sait que sin⎜ ⎟ = (et cos ⎜ ⎟ = ) .
⎝ 3⎠ 2 ⎝ 3⎠ 2
Il y a deux points images des solutions de l’équation
(E 1 ) sur le cercle trigonométrique (les deux points A
π 0 3
O 1 2π et B ayant pour ordonnée − ).
π 2 2
3
3
On cherche les mesures associées à ces deux points
2
4π A dans [0 ; 2π ].
B 5π
3 3
138 Séquence 3
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-38-320.jpg)
![⎧ 4π
⎪x = (mesure associée à A)
⎪ 3
3 ⎪
Donc sin x = − ⇔ ⎨ou
2 ⎪
⎪ x = 5π (mesure associée à B)
m
⎪
⎩ 3
D’où l’ensemble des solutions de l’équation dans [0 ; 2π ] est :
⎧ 4π 5π ⎫
=⎨ ; ⎬.
⎩3 3⎭
⎧ 4π 5π ⎫
Remarque : Dans » , on aurait : = ⎨ +2k π ; + 2k π avec k ∈» ⎬
⎩3 3 ⎭
3
(I1 ) sin x > − dans [0 ; 2π ] :
2
On utilise la figure précédente : cette fois, les solutions
de l’inéquation sont représentées par la « partie supé-
j
rieure » de l’arc AB c’est-à-dire par les points du cercle
0 3
O 2π dont l’ordonnée est strictement plus grande que −
π
i 2
3 . Il reste à lire les mesures associées à ces points dans
3
2 [0 ; 2π ]. D’où l’ensemble des solutions de l’équation
4π A B 5π ⎡ 4π ⎡ ⎤ 5π ⎤
3 3 dans [0 ; 2π ] est : = ⎢0 ; ⎢ ∪ ⎥ ; 2π ⎥ .
⎣ 3 ⎣ ⎦3 ⎦
2
(E 2 ) cos(2x ) = dans » :
B 7π A 2
8 π ⎛ π⎞ 2
8 On sait que cos ⎜ ⎟ = . Donc
π ⎝ 4⎠ 2
⎧ π
O 8
⎪ 2x = + 2k π
C D ⎪ 4
⎛ π⎞ ⎪
(E 2 ) ⇔ cos(2x ) = cos ⎜ ⎟ ⇔ ⎨ ou (k ∈ » )
⎝ 4⎠ ⎪ π
⎪2x = − + 2k π
⎪
⎩ 4
Remarque ⎧ π
π π ⎪ x = + k π (1)
(1) ⇔ x = + 2k π ou x = + π + 2k π ⎪ 8
8 8 ⎪
⇔⎨ ou (k ∈» ).
π 9π ⎪ π
⇔ x = (2π ) ou x = (2π ) ⎪ x = − + k π (2 )
8 8
⎪
⎩ 8
π 7π ⎧π π ⎫
⇔ x = (2π ) ou x = − (2π ) D’où = ⎨ + k π ; − + k π , k ∈» ⎬ .
8 8 ⎩8 8 ⎭
L’ensemble solution de (E 2 ) dans » s’écrit aussi :
π
et (2) ⇔ x = − + 2k π ⎧π π 7π 7π ⎫
8 = ⎨ + 2k π ; − + 2k π ; + 2k π ; − + 2k π , k ∈» ⎬ .
π ⎩8 8 8 8 ⎭
ou x = − + π + 2k π Les points A, B, C, D correspondent aux points images
8 des solutions (voir remarque).
Séquence 3 139
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-39-320.jpg)

![Exercice 7 Considérons le plan auxiliaire (AIJ). L’intersection des plans (AIJ) et (BCD)
est la droite (I'J'), I' étant le point d’intersection des droites (AI) et (BC) et
J' celui des droites (AJ) et (CD). L’intersection de la droite (IJ) avec le plan
(BCD) est alors le point K intersection des droites (IJ) et (I'J').
Dans (ABC), notons I'' le point d’intersection de la parallèle à (AC) pas-
sant par I et de la droite (AB).
A
Dans (ACD), notons J'' le point d’in-
tersection de la parallèle à (AC)
L I” J”
passant par J et de la droite (AD).
La droite (I''J'') est donc une droite
I
J du plan (ABD).
D De plus, les droites (II'') et (JJ'')
B K sont parallèles car elles sont tou-
J’
I’ tes les deux parallèles à la droite
C (AC).
Les points I, I'', J et J'' sont donc
coplanaires et les droites (IJ) et (I''J'') sont coplanaires sécantes (elles
ne sont pas coplanaires parallèles car la droite (IJ) n’est pas parallèle au
plan (ABD)).
Notons L le point d’intersection des droites (IJ) et (I''J''). L est alors le
point d’intersection de la droite (IJ) et du plan (ABD) car (I''J'') est une
droite du plan (ABD).
Exercice 8 (IJ) coupe respectivement les droites (AB) et (AD) en L et M.
(MK) coupe (AE) en N et [DH] en P.
N (LN) coupe [BF] en R et [EF] en Q.
La section du cube par le plan (IJK) est donc l’hexa-
E K H gone IJPKQR.
Q
F G
Remarque : (KQ) est parallèle à(IJ) car il s’agit des
P droites d’intersection du plan (IJK) avec respective-
ment les plans (EFH) et (ABD) qui sont parallèles.
R D
A M
J
B
L I C
⎛ 2⎞ ⎛ 3⎞ ⎛ 1⎞
Exercice 9 ⎜ −3⎟ et v ⎜ −1⎟ ne sont pas colinéaires et on a : w ⎜ −3⎟ .
Les vecteurs u ⎜ ⎟ ⎜ ⎟ ⎜ ⎟
⎜ 1⎟
⎝ ⎠ ⎜ 4⎟
⎝ ⎠ ⎜ −1⎟
⎝ ⎠
Existe-t-il deux réels a et b tels que w = au + bv ? ⎧ 8
⎪a =
On a : ⎧1 = 2a + 3b ⎧1 = 2a + 3b ⎧−7a = −8 ⎪ 7
⎪ ⎪ ⎪ ⎪ −3
w = au + bv ⇔ ⎨−3 = −3a − b ⇔ ⎨−9 = −9a − 3b ⇔ ⎨b = −3a + 3 ⇔ ⎨b = .
⎪−1 = a + 4b ⎪−1 = a + 4b ⎪−1 = a + 4b ⎪ 7
⎩ ⎩ ⎩ ⎪−1 = a + 4b
⎪
8 −3 −4 ⎩
Or + 4 × = ≠ −1 donc le système n’a pas de solution. Par consé-
7 7 7
quent, les vecteurs u , v et w ne sont pas coplanaires.
Séquence 3 141
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-41-320.jpg)


![Exercice 17 {( ) (
Soit G le barycentre du système pondéré A ; 3 ; B ; −2 ; C ; 1 ; G ) ( )}
existe car 3 − 2 + 1 = 2 ≠ 0.
On a alors : 3MA − 2MB + MC = DB ⇔ 2MG = DB d’après la propriété fon-
1
damentale du barycentre et donc : 3MA − 2MB + MC = DB ⇔ GM = BD. Il
2
existe donc un unique point M tel que 3MA − 2MB + MC = DB.
Pour construire ce point M,
M D
on construit d’abord le point
C
G : on place H barycentre de
G
{( ) (
A ; 3 ; B ; −2 )}
en utilisant
l’égalité vectorielle BH = 3BA,
A B G est alors le barycentre de
{( ) ( )}
H ; 1 ; C ; 1 c’est-à-dire le
milieu de ⎡HC ⎤ .
⎣ ⎦
1
On place ensuite le point M en utilisant l’égalité vectorielle GM = BD.
2
Exercice 18 Considérons le barycentre G des points pondérés A ; 1 , B ; 2 et ( ) ( )
( )
C ; −5 ; G existe car 1 + 2 − 5 = −2 ≠ 0.
Comme 1 − 1 = 0, le vecteur MA − MB est un vecteur constant :
MA − MB = BA.
On a : MA + 2MB − 5MC = MA − MB ⇔ −2MG = BA
1
⇔ 2MG = BA ⇔ GM = BA.
2
1
L’ensemble Ᏹ est donc le cercle de centre G et de rayon BA.
2
( ) ( ) ( )
A 2 ; 3 , B −1 ; 4 , C 2 ; −3 et G est le barycentre des points pon-
x + 2xB − 5x C
dérés ( A ; 1), (B ; 2) et (C ; −5) donc on a : x G = A
−2
= 5 et
y + 2y B − 5y C
yG = A = −13.
−2
( 2
) (2
On a aussi : BA = x A − xB + y A − y B = 9 + 1 = 10.)
(
L’ensemble Ᏹ est donc le cercle de centre G 5 ; −13 et de rayon )
10
2
.
Exercice 19 ̈ On a : CB + CD + CG − CE = CB + BA + AE + EC = CC = 0 donc C est le bary-
{( ) ( ) ( ) (
centre du système B ; 1 ; D ; 1 ; G ; 1 ; E ; −1 . )}
E H ̈ Soit I le centre de gravité du triangle BDG.
I est l’isobarycentre des points B, D et G donc le bary-
F G
centre du système {( ) ( ) ( )}
B ; 1 ; D ; 1 ; G ; 1 D’après
l’associativité du barycentre, C est alors le barycentre
I
{( ) ( )}
de I ; 3 ; E ; −1 et par définition du barycentre,
on a :
A D 1
3CI − CE = 0 d’où CI = CE. I est donc au tiers de [CE]
en partant de C. 3
B C
144 Séquence 3
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-44-320.jpg)
![Exercice 20 ( )
On a : M x ; y ∈ Ꮿ ⇔ ΩM = 5 ⇔ ΩM2 = 25 ⇔ x − x Ω ( )2 + (y − y Ω )2 = 25
M( x ; y ) ∈ Ꮿ ⇔ ( x + 3) + (y − 2) = 25.
2 2
(
Une équation de Ꮿ est donc x + 3 + y − 2 )2 ( )2 = 25 soit en développant
x 2 + y 2 + 6x − 4y − 12 = 0.
Exercice 21 ( ) ( )( ) (
On a : M x ; y ∈ Ꮿ ⇔ MA ⋅ MB = 0 ⇔ 4 − x −2 − x + −5 − y 1 − y = 0 )( )
⎛4− x ⎞ ⎛ −2 − x ⎞
car MA ⎜ ⎟ et MB ⎜ 1 − y ⎟
⎝ −5 − y ⎠ ⎝ ⎠
( )
M x ; y ∈ Ꮿ ⇔ −8 − 4 x + 2x + x 2 − 5 + 5y − y + y 2 = 0 ⇔ x 2 + y 2 − 2x + 4y − 13 = 0.
Une équation du cercle Ꮿ est donc x 2 + y 2 − 2x + 4y − 13 = 0.
Remarque : ( )2 ( )2
x 2 + y 2 − 2x + 4y − 13 = 0 ⇔ x − 1 − 1 + y + 2 − 4 − 13 = 0
⇔ ( x − 1) + (y + 2) = 18
2 2
Ꮿ est donc le cercle de centre Ω (1 ; −2) et de rayon
− 18 = 3 2.
Exercice 22 La médiatrice (d ) de [AB] est perpendiculaire à [AB] et passe par son
milieu I.
x +x −4 + 2
Les coordonnées de I sont : xI = A B = = −1 et
2 2
y +y 2+5 7
yI = A B = = .
2 2 2
( ) ()
On a : M x ; y ∈ d ⇔ IM ⋅ AB = 0.
⎛ x − xI ⎞ ⎛ x +1⎞ ⎛ xB − x A ⎞ ⎛ 6⎞
Or IM ⎜ ⎟ , IM ⎜ 7 ⎟ et AB ⎜ ⎟ , AB ⎜ ⎟
⎝ y − yI ⎠ ⎜y − ⎟ ⎝ yB − y A ⎠ ⎝ 3⎠
⎝ 2⎠
⎛ 7⎞
( ) () ( )
donc M x ; y ∈ d ⇔ x + 1 × 6 + ⎜ y − ⎟ × 3 = 0
⎝ 2⎠
9
⇔ 6x + 3y − = 0 ⇔ 4 x + 2y − 3 = 0.
2
Une équation cartésienne de (d ) est donc 4 x + 2y − 3 = 0.
3
Son équation réduite est y = −2x + .
2
Exercice 23 On a : u ⋅v = 6 × 3 + ( −4 ) × 4,5 = 0 ; u ⋅w = −6 − 6 = −12 ≠ 0 ;
u ⋅t = −12 + 12 = 0 ;
Séquence 3 145
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-45-320.jpg)
![v ⋅w = −3 + 6, 75 = 3, 75 ≠ 0 ; v ⋅t = −6 − 13,5 = −19,5 ≠ 0 ;
w ⋅t = 2 − 4,5 = −2,5 ≠ 0.
u et v sont donc orthogonaux, ainsi que u et t . Les autres ne sont pas
orthogonaux. ⎛ x⎞ ⎛ x '⎞
Pour la colinéarité, on utilise le résultat suivant : u ⎜ ⎟ et v ⎜ ⎟ coli-
⎝y ⎠ ⎝ y '⎠
néaires ⇔ xy '− yx ' = 0 (coordonnées proportionnelles). u et v ne sont
pas colinéaires ainsi que u et t car ce sont des vecteurs orthogonaux.
( )
Pour u et w : 6 × 1,5 − −4 × ( −1) = 5 ≠ 0 donc u et w ne sont pas coli-
néaires.
Pour v et w : 3 × 1,5 − 4,5 × ( −1) = 9 ≠ 0 donc v et w ne sont pas coli-
néaires.
Pour v et t : 3 × ( −3) − 4,5 × ( −2) = 0 donc v et t sont colinéaires.
Pour w et t : −1 × ( −3) − 1,5 × ( −2) = 6 ≠ 0 donc w et t ne sont pas coli-
néaires.
Exercice 24 ABC et ABD sont équilatéraux de côté a cm.
⎛ 2π ⎞ a2
On a : AC ⋅ AD = AC × AD × cosDAC = a × a × cos ⎜ ⎟ = −
⎝ 3⎠ 2
A
π
D ( )
CA ⋅ CD = CA ⋅ CB + BD = CA ⋅ CB + CA ⋅ BD
a2 2
π
3
or CA ⋅ CB = CA × CB × cos ACB =et CA ⋅ BD = CA = a2
3
I 2
car CA = BD (CADB est un losange)
a2 2 3a2
donc CA ⋅ CD = +a = ;
2 2
C
B
AB ⋅ CD = 0 car AB et CD sont orthogonaux ([AB] et
[CD] sont les diagonales du losange).
Remarque : Pour calculer CA ⋅ CD, on peut aussi utiliser le projeté orthogonal I de A
sur (CD) (I est en fait le milieu de [CD], et aussi celui de [AB]) :
CA ⋅ CD = CI ⋅ CD = CI × CD car CI et CD sont colinéaires de même sens
2
⎛a 3⎞ 3a2
CA ⋅ CD = 2CI2 = 2 × ⎜ ⎟ = (la hauteur d’un triangle équilatéral
⎝ 2 ⎠ 2
a 3
de côté a mesure ).
2
Exercice 25 ( )( )
ᕡ On a : IA + AD ⋅ IB + BC = IA ⋅ IB + IA ⋅ BC + AD ⋅ IB + AD ⋅ BC.
Or IA et IB sont colinéaires de sens contraires donc
IA ⋅ IB = −IA × IB = −2 × 3 = −6
146 Séquence 3
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-46-320.jpg)
![D 5 C
IA et BC sont orthogonaux donc IA ⋅ BC = 0 ;
AD et IB sont orthogonaux donc AD ⋅ IB = 0
AD et BC sont colinéaires de même sens donc
AD ⋅ BC = AD × BC = 16.
4
Par conséquent, on a :
(IA + AD) ⋅(IB + BC) = −6 + 0 + 0 + 16 = 10.
D’autre part, d’après la relation de Chasles, on a :
A 2 I 3 B
IA + AD = ID et IB + BC = IC donc ID ⋅ IC = 10.
ᕢ Dans le triangle IDA rectangle en A, on a : ID2 = AD2 + AI2 d’après le
théorème de Pythagore. D’où ID = AD2 + AI2 = 16 + 4 = 20 = 2 5.
En travaillant de la même façon dans ICB rectangle en B, on obtient :
IC = 5. Comme ID ⋅ IC = ID × IC × cos CID, on a :
ID ⋅ IC 10 1 5
cos CID = = = = .
ID × IC 2 5 × 5 5 5
Exercice 26 On a : AB ⋅ AC = AB × AC × cos CAB. Or d’après la formule d’Al Kashi,
BC2 = AB2 + AC2 − 2AB × AC cos CAB
AB2 + AC2 − BC2
donc cosCAB = d’où
2AB × AC
AB2 + AC2 − BC2 AB2 + AC2 − BC2
AB ⋅ AC = AB × AC × =
2AB × AC 2
( )
2 2
(Remarque : On peut aussi développer CB = AB − AC )
AB2 + AC2 − BC2 36 + 64 − 121 −21
On a : AB ⋅ AC = = = .
2 2 2
Exercice 27 Soit I le centre du parallélogramme ABCD.
AC
I est donc le milieu de [AC] et [BD] d’où AI = = 3.
2
BD2
Dans le triangle ABD, on a : AB2 + AD2 = 2AI2 +
2
d’après le théorème de la médiane.
( ) (
D’où : BD2 = 2 AB2 + AD2 − 2AI2 = 2 25 + 16 − 18 = 46 )
et donc BD = 46.
Séquence 3 147
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-47-320.jpg)
![Exercice 28 ( )(
On a : M ∈ Ᏹ ⇔ MA2 − MB2 = 12 ⇔ MA + MB ⋅ MA − MB = 12 )
⇔ (MA + MB) ⋅ (BM + MA ) = 12 ⇔ (MA + MB) ⋅ BA = 12.
Notons G l’isobarycentre des points A et B c’est-à-
dire le milieu du segment [AB]. D’après la relation fon-
damentale, on a alors pour tout point M du plan :
A G H B MA + MB = 2MG.
D’où : M ∈ Ᏹ ⇔ 2MG ⋅ BA = 12 ⇔ MG ⋅ BA = 6.
Notons H le projeté orthogonal de M sur la droite
(AB). On a alors : M ∈ Ᏹ ⇔ HG ⋅ BA = 6 ⇔ HG × BA = 6
(d) et HG et BA de même sens donc :
6 3
M ∈ Ᏹ ⇔ GH = = et HG et BA de même sens.
BA 2
L’ensemble Ᏹ est donc la droite (d) passant par le point H défini par
3
GH = AB, et perpendiculaire à (AB).
8
Exercice 29 ᕡ On cherche une égalité du type DG = k DB .
2
On a déjà BG = BO car G est le centre de gravité de ABC et que
3 1
O est le milieu de [AC]. Puis BO = BD car O milieu de [BD] donc
2
2 ⎛1 ⎞ 1 1 2 2
BG = × ⎜ BD⎟ = BD soit BD + DG = BD et DG = − BD = DB . Le rap-
3 ⎝2 ⎠ 3 3 3 3
2
port de l’homothétie h de centre D qui transforme B en G est donc .
3
ᕢ Pour construire les images de A et C, on utilise le
A B
fait que l’image A' de A par h est l’intersection de (DA)
A’ G et de la parallèle à la droite (BA) passant par h(B) = G
O et de même que l’image C' de C par h est l’intersec-
tion de (DC) et de la parallèle à la droite (BC) passant
D C’ C
par G.
Exercice 30 On va montrer que S est l’image de R par l’homothétie
1
E H h de centre A et de rapport . En effet, on a K milieu
1 2
G
de [AC] donc AK = AC soit h( C ) = K. De même J est
F
2
le milieu de [AF] et I celui de [AH] donc h(F ) = J et
R
J
I
h(H) = I. D’où : h : C K .
S F J
H I
A D L’image du centre de gravité R de CFH est donc le
K
centre de gravité de KJI soit h(R) = S (conservation du
B C
barycentre). Le point R, l’image S de R par h et le cen-
tre A de h sont donc alignés.
148 Séquence 3
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-48-320.jpg)
![Exercice 31 On cherche à écrire G comme image du point M par une certaine trans-
formation.
Soit I le milieu de [AB]. G étant le centre de gravité du
M
1
triangle MAB, on a : IG = IM. G est donc l’image du
Ꮿ 3
point M par l’homothétie h de centre I et de rapport
1
. Or M décrit le cercle Ꮿ de centre O, de rayon r,
O 3
privé des points A et B donc G décrit l’image du cercle
G
O’ Ꮿ par h privé des points A' = h( A ) et B' = h(B ). Donc
B
A’ I B’ par propriété, le lieu géométrique du point G est le
A
Ꮿ’ 1
cercle Ꮿ' de centre O' = h( O) de rayon r, privé des
3
points A' et B'.
Exercice 32 On cherche à écrire N comme image du point M par une certaine trans-
formation.
ABMN parallélogrammme ⇔ BA = MN ⇔ t (M ) = N.
BA
B
Comme M décrit la droite (d ), N
M3 décrit l’image de la droite (d ) par
A
M4 N3 la translation de vecteur BA. Le
M1 lieu géométrique du point N est
A’
M2
N4 donc la droite (d ') parallèle à (d )
(d) N1
passant par A ' = t ( A ).
BA
N2
(d’)
Exercice 33 On a trois contraintes à respecter : F ∈Ꮿ , G ∈Ꮿ' et DEGF parallélo-
gramme. On peut en premier lieu faire un « abandon de contrainte » et
« oublier » le fait que G ∈Ꮿ' .
En plaçant quelques points F sur Ꮿ (f1,f2 ,f3 ,...) et en construisant les
points G associés ( g1, g2 , g3 ,...) tels que DEGF est un parallélogramme,
E
D on remarque que les points g1, g2 , g3 ,... sont sur un
g1 G1
f1 F1 g2 Ꮿ’
cercle qui semble être l’image de Ꮿ par une translation.
Ꮿ Raisonnons par analyse-synthèse :
g6 f2
f6 O”
O O’
g5 ̈ Analyse : On cherche des conditions nécessaires
f5
à l’élaboration de la construction. DEGF parallélo-
Ꮿ”
g4 G2 gramme se traduit par : t (F ) = G. Comme on veut
DE
f4 g3
F2 f3 que F ∈Ꮿ cela implique que G ∈ t ( Ꮿ) .
DE
Séquence 3 149
Cned – Académie en ligne](https://image.slidesharecdn.com/al7ma19tepa0009-sequence-03-120523020933-phpapp02/85/Al7-ma19tepa0009-sequence-03-49-320.jpg)



































































































